Manual del Curso de Timonel de Yate de Vela y Motor
San Isidro, Argentina
CVPB - Jorge Messano
14-May-2026
46 minutos
Capítulo 03: Navegación
El Problema de la Posición: Métodos de Posicionamiento de Navegación Costera
Introducción
Los métodos de posicionamiento asociados a la navegación costera, que se efectúa cuando se navega con la costa a la vista, utilizan puntos notables visibles para trazar una o más líneas de posición cuya intersección determina la posición del buque.
La exactitud dependerá de la calidad de las observaciones y del método gráfico empleado.
Recorreremos ahora el catálogo de métodos de posicionamiento factibles de ser utilizados en una navegación costera, con puntos notables a la vista.
Posicionamiento por Marcaciones a Dos Puntos Notables
Consiste en establecer la posición a partir de la intersección de dos líneas de posición correspondientes a otros tantos puntos notables u objetos señalados en las cartas náuticas. Las líneas de posición pueden ser de cualquiera de los tipos definidos, por ejemplo, una marcación o un arco de distancia, sin ser esta enumeración una limitante.
Idealmente, cuando se trabaja con solo dos líneas de posición, como en este caso, la práctica adecuada consiste en buscar aquellas que se crucen perpendicularmente, o en un ángulo cercano a esa configuración.
Así entonces, en este método, la posición estará definida por el punto donde ambas líneas de posición se cruzan.
Supongamos el siguiente ejemplo para demostrar el método:
planteo
Siendo las 10:00 hs del martes 25 de noviembre de 2025, estamos navegando a bordo del velero "Primavera" en aguas del mar Argentino, frente a las costas de la localidad balnearia de San Clemente del Tuyú, con rumbo compás de 010º y a una velocidad de 5,0 nudos.
En esa situación, tomamos las siguientes marcaciones, utilizando la pínula, al faro del cabo San Antonio y a una antena de radio visible en la costa.
McAntena
: 232º [10:00 hs]
Mcf.S.Antonio
: 285º [10:05 hs]
Con estas marcaciones deseamos estimar nuestra posición.
Ambos puntos notables están bien referenciados en las cartas náuticas de la zona y, para completar los datos de navegación, indicamos que la declinación magnética del lugar, ya actualizada al año 2025, es de -11º, y que el compás del barco tiene un desvío de +1º —un grado a estribor—.
Veamos la resolución del caso:
paso 1
Anotar los Datos de Trabajo.
Procedemos a compilar en la entrada de bitácora, los parámetros de la navegación y las observaciones realizadas con las que luego estimaremos nuestra posición, gráficamente.
bitácora BV "Primavera"
fecha y hora
: 10:00 25-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 010º
Ve
: 5,0 nudos
observaciones
McAntena
: 232º [10:00 hs]
Mcf.S.Antonio
: 285º [10:05 hs]
paso 2
Procesar las Líneas de Posición.
Para poder llevar a la carta las marcaciones que fueron tomadas con un elemento magnético, debemos convertirlas primero a sus valores verdaderos, utilizando la ecuación fundamental que iguala ambos mundos: el verdadero con el magnético.
Mv
= Mc + Dm + δ
...o, mejor aún, con su versión resumida, basada en la variación total "Vt":
Mv
= Mc + Vt
...siendo:
Vt
= Dm + δ
Procederemos al cálculo de las marcaciones verdaderas "Mv" con la versión reducida de la ecuación.
Vt
= Dm + δ =
= -11º + +1º =
= -10º
MvAntena
= McAntena + Vt =
= 232º + -10º =
= 222º
Mvf.S.Antonio
= Mcf.S.Antonio + Vt =
= 285º + -10º =
= 275º
Es decir que, las marcaciones verdaderas a la Antena en la costa y al faro San Antonio son de 222º y 275º respectivamente.
Esas marcaciones verdaderas configuran ya líneas de posición válidas para ser llevadas a la carta náutica.
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Posición.
El último paso consiste en trazar ambas marcaciones verdaderas en la carta y, hecho eso, estimar la posición en la que se encuentra la embarcación, utilizando las escalas de latitudes y longitudes ubicadas en los bordes de la carta náutica.
Posicionamiento por marcaciones a 2 puntos notables.
Así entonces, luego de trabajar sobre la carta, estimamos que la posición del "Primavera" es:
bitácora BV "Primavera"
fecha y hora
: 10:00 25-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 010º
Ve
: 5,0 nudos
posición: LOP Fix
φ
: 36º 18,87' S
ω
: 056º 40,32’ W
La sigla "LOP Fix" significa que la posición fue establecida mediante "Line Of Position" —"Línea de Posición" en español, de allí la sigla LOP— y que la estima es confiable y precisa. Esta nomenclatura responde a un glosario estandarizado de abreviaturas, que explicamos al final de esta nota.
Con este último paso hemos completado el método de estima de la posición utilizando dos líneas de posición basadas en observaciones a otros tantos puntos notables.
Luego de completar esta primera estima de posición, conviene hacer dos comentarios de contexto, algo largos.
El primero tiene que ver con la forma de anotar la posición.
Si bien habría bastado con copiar la latitud y la longitud, el autor prefiere registrar una entrada completa de bitácora, usando incluso las letras griegas "φ" y "ω" —letra "phi" y "omega" minúsculas— para identificar la latitud y la longitud.
Esto no es un capricho: es la forma en que la buena práctica marinera recomienda hacerlo. Los registros y observaciones de la navegación deben asentarse en la bitácora del barco junto con toda la información relevante: condiciones meteorológicas y mareológicas, configuración con la que el barco está navegando, estado de la tripulación, situación de víveres y combustible, y cualquier otra novedad significativa que deba conocer quien tome la guardia después de Usted, o que simplemente valga la pena recordar luego, entre amigos.
En este caso, además de la posición, se anotaron el rumbo compás y la velocidad.
¡Ah!... y las siglas "BV" significan "buque de vela". Responden a un estándar de nomenclatura de buques. Si fuese un buque de propulsión mecánica, la sigla habría sido "BM".
El segundo comentario tiene que ver con la precisión del "punto" de la posición estimada.
Digo "punto" porque, en este caso, la estima surge de la intersección de dos líneas de posición. La realidad es que esa precisión suele tener error; por eso hablamos de "posición estimada” y no de "posición exacta". La magnitud del error depende de dos factores: cuánto tiempo tomó el proceso de observación y cuán preciso fue el observador al realizar las mediciones.
El error en la posición.
Respecto del tiempo, salvo que el "Primavera" hubiera estado quieto en el agua, el barco ha seguido navegando entre la toma de la primera y la última observación, generando un área de incertidumbre aproximadamente equivalente a la distancia recorrida en ese intervalo.
Existen técnicas para mitigar esto —el autor ya las ha explicado en otras notas— como tomar primero las observaciones hacia puntos situados a proa o a popa del rumbo, dejando para el final las que están sobre los traveses. Esto se debe a que las primeras varían menos con el avance del barco. Por eso, en el ejemplo, se tomó primero la marcación a la "Antena" y se dejó para el final la marcación al "faro San Antonio", que estaba más al través.
En cuanto a la precisión del observador, cualquier pequeño desplazamiento o error en la medición afectará directamente la estima final. En la toma de marcaciones —como en este caso— es común un error de uno o dos grados, que al proyectarse en la carta amplía el área de la posición estimada.
Si comparamos la posición obtenida en el ejemplo anterior, considerando el orden de las marcaciones, los cinco minutos transcurridos entre una y otra, y suponiendo además un error del observador de alrededor de un grado, veremos que ese "punto" inicial se transforma en un área con una extensión aproximada de media milla entre Este y Oeste, y un par de cables entre Norte y Sur.
Por eso, repito, hablamos en general de "posición estimada", y reservamos el término "posición fija" —o simplemente "posición fix"— para cuando estamos razonablemente seguros de que el error es mínimo, circunscripto a un área no mayor que la del propio barco.
Posicionamiento por Marcaciones a Tres o Más Puntos Notables
Este método consiste en obtener tres o más líneas de posición a puntos notables visibles, cuya intersección permitirá determinar la posición de la embarcación.
La buena práctica marinera recomienda tomar al menos tres marcaciones y, si la situación lo permite, agregar todas las adicionales que resulten útiles para reforzar la precisión.
Los puntos notables elegidos deberían estar distribuidos uniformemente en el horizonte visible, con una separación mínima de 040° a 045° entre ellos, lo cual implica que para obtener tres marcaciones se debe abarcar entre 120° y 135° de horizonte. Cuando esta separación angular ideal no puede cumplirse —por ejemplo, en costas con pocos puntos notables o con referencias muy alineadas— se admite reducir la distancia angular entre ellos hasta un mínimo razonable de 020°, compensando la pérdida de geometría con la incorporación de otro tipo de líneas de posición adicionales —de distancia, por ejemplo— para ganar redundancia y mejorar la fiabilidad del resultado.
Por último, y repitiendo lo ya explicado para el caso específico de las marcaciones, conviene comenzar su anotación por los puntos notables cuya marcación varía menos con el avance del barco —aquellos ubicados más próximos a la línea de la derrota— y dejar para el final los que se encuentran más hacia los traveses. Esto reduce el error introducido por el avance del barco durante el lapso en que se completan las observaciones y mejora la calidad de la estima resultante.
Para demostrar el caso de uso, agregaremos una línea de posición al planteo del ejemplo anterior.
planteo
Siendo las 10:00 hs del martes 25 de noviembre de 2025, estamos navegando a bordo del velero "Primavera" en aguas del mar Argentino, frente a las costas de la localidad balnearia de San Clemente del Tuyú, con rumbo compás de 010º y a una velocidad de 5,0 nudos, tomamos las siguientes marcaciones con la pínula al faro del cabo San Antonio y a una antena de radio visible en la costa.
McAntena
: 232º [10:00 hs]
Mcf.S.Antonio
: 285º [10:05 hs]
άf.S.Antonio
: 0º24' [10:07 hs]
Así entonces, contamos ahora con tres líneas de posición para estimar la ubicación del "Primavera": dos marcaciones —las mismas del ejemplo anterior— y la altura angular "άf.S.Antonio" tomada al faro San Antonio, que servirá para trazar un arco de distancia.
Con estas líneas de posición deseamos estimar nuestra posición.
Veamos cómo se resuelve el caso:
paso 1
Anotar los Datos de Trabajo.
Al igual que en ejemplo anterior, adoptamos la práctica de compilar en la bitácora los parámetros de navegación y observaciones con las que debemos trabajar.
bitácora BV "Primavera"
fecha y hora
: 10:00 25-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 010º
Ve
: 5,0 nudos
observaciones
McAntena
: 232º
Mcf.S.Antonio
: 285º
άf.S.Antonio
: 0º24'
paso 2
Procesar las Líneas de Posición.
De la misma forma que en el caso anterior, para poder llevar a la carta las marcaciones tomadas con la pínula, debemos convertirlas primero a sus valores verdaderos.
Dado que ya hemos realizado esa conversión en el ejemplo anterior, evitaremos repetirlo, copiando sus resultados.
MvAntena
: 222º
Mvf.S.Antonio
: 275º
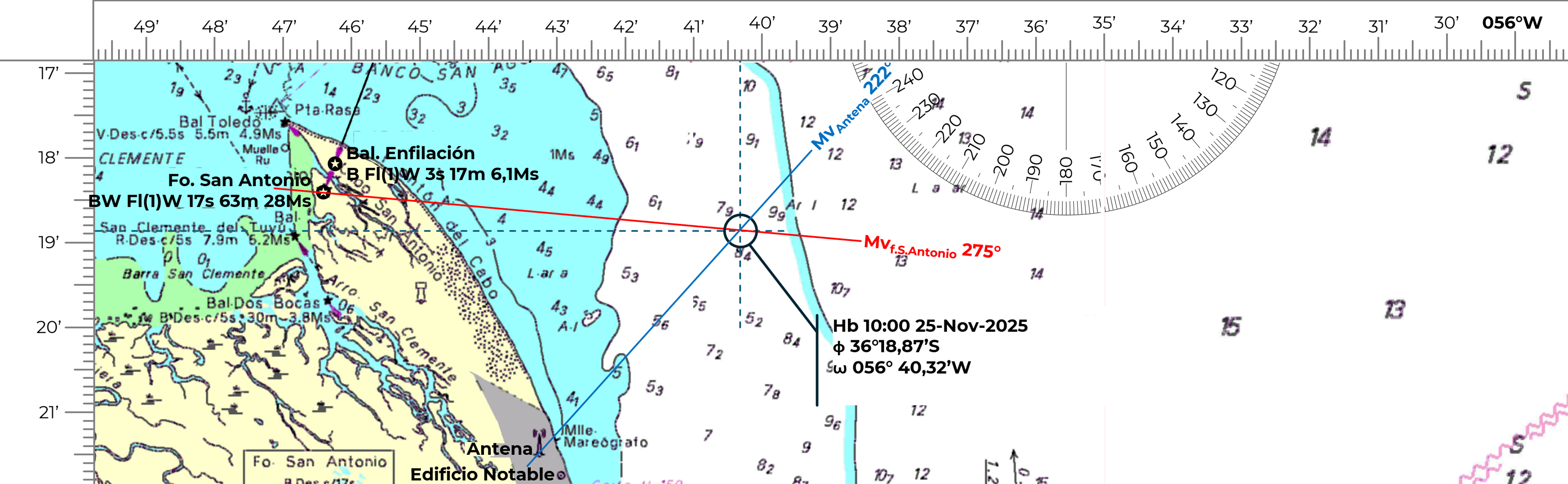
Debemos ahora agregar la medida de la distancia del radio del arco de visibilidad —la tercera línea de posición— que debemos trazar en la carta.
La "altura angular" medida al punto notable —es decir al Faro San Antonio— dato que ya hemos obtenido en las observaciones del planteo.
La altura vertical (en metros) del punto notable en cuestión, que la obtendremos de su descripción, anotada en la carta náutica.
f. San Antonio
: BW Fl(1)W 17s 63m 28Ms
Hf.S.Antonio
: 63 metros
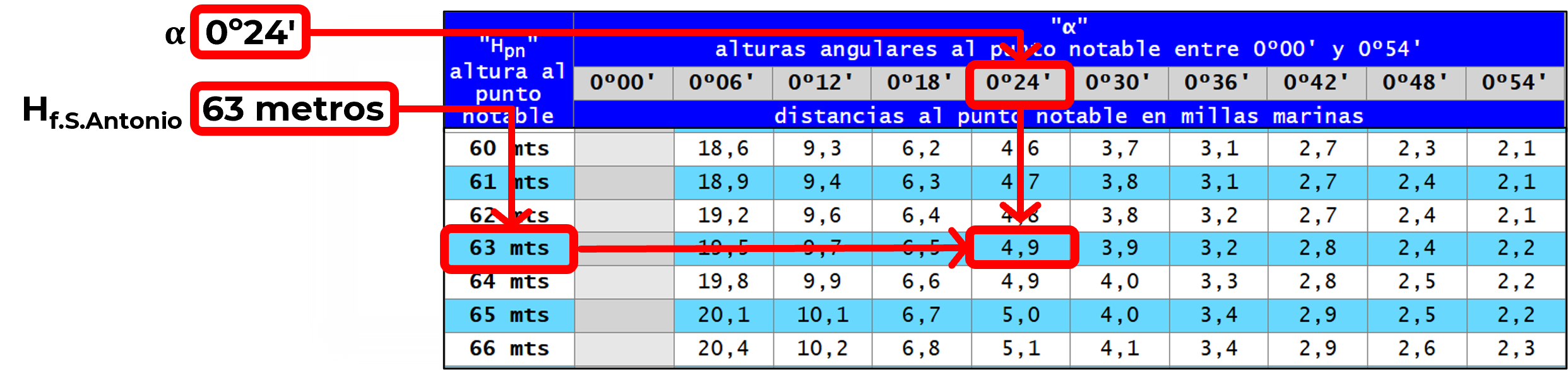
Tabla para Hallar la Distancia a un Punto Notable.
Entonces, con la altura del faro San Antonio Hf.S.Antonio, que es de 63 metros, y su altura angular observada desde la embarcación άf.S.Antonio de 0º24', podemos ir a la "Tabla para Hallar la Distancia a un Punto Notable" y obtener la distancia que servirá de radio para trazar el arco de distancia.
Df.S.Antonio
= 4,9 millas
El resultado es que la distancia al faro es de 4,9 millas.
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Posición.
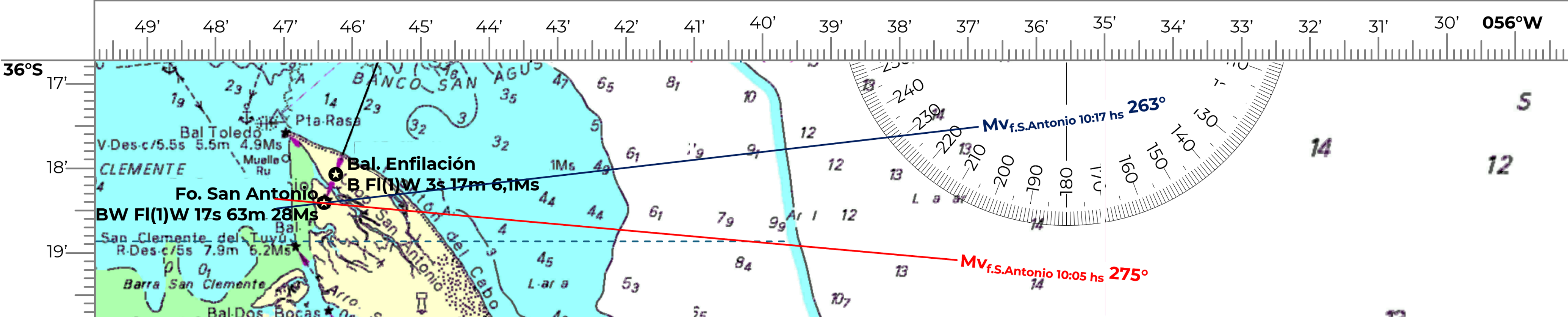
Ya con el dato de la distancia "Df.S.Antonio" y de las marcaciones "MvAntena" y "Mvf.S.Antonio" resueltos, se pueden trazar las líneas de posición en la carta náutica.
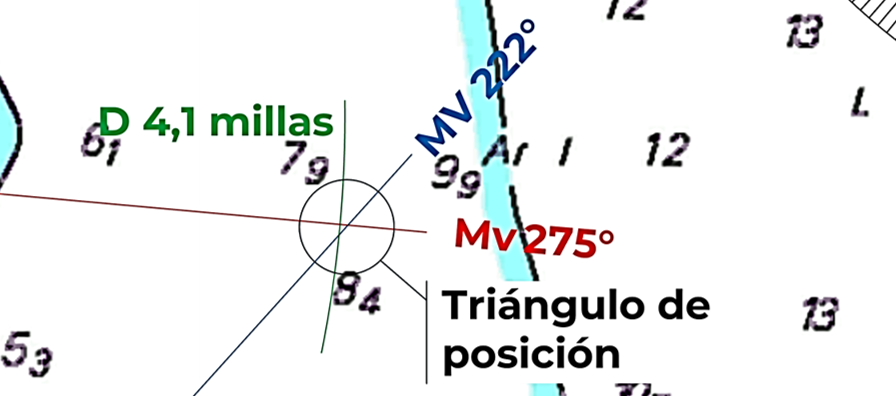
Trazado de líneas de posición.
Las marcaciones han quedado trazadas en rojo y azul, mientras que el arco de distancia lo fue en verde.
La posición, en este caso, en lugar de resultar en un "punto" en el que se cruzan las líneas de posición, queda formada por un área triangular conformado por los segmentos de cada línea de posición involucradas —aun cuando uno de sus lados es parte de un arco, y no de una recta—. Esa área triangular se la denomina "triángulo de posición".
Luego, y simplemente por un tema de practicidad, se conviene estimar la posición en el centro de ese triángulo. Y en este caso es entonces:
bitácora BV "Primavera"
fecha y hora
: 10:00 25-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 010º
Ve
: 5,0 nudos
posición: LOP Fix
φ
: 36º 18,87' S
ω
: 056º 40,35’ W
Con este último paso hemos completado el método de estima de la posición utilizando tres líneas de posición de distintos tipos.
Tengo algunos comentarios prácticos adicionales.
Primero, vamos a ampliar la resolución gráfica de la posición para visualizar mejor el llamado “triángulo de posición”. Tal como explicó el autor, está conformado por las mismas dos marcaciones —trazadas en rojo y azul— a las que se les suma otra línea de posición formada por un segmento del arco de distancia al faro —en verde—.
En cuanto a la exactitud del método, vale recordar que al disponer de tres o más líneas de posición se gana en redundancia y, por lo tanto, en precisión.
Con la combinación de tres líneas de posición se obtiene una forma triangular, con cuatro líneas de posición se obtendrá un polígono de cuatro lados, y así sucesivamente. El área interior de ese triángulo o polígono representa la zona donde se estima que se encuentra la embarcación.
El triángulo de posición.
En este ejemplo, el agregado de la tercera línea de posición basada en el arco de distancia permitió definir una posición —latitud y longitud— mínimamente diferente a la que resultó del método anterior. Eso no significa que un resultado sea correcto o el otro incorrecto, sino que confirma que en ambos casos se están "estimando" posiciones y, por lo tanto, es esperable que haya diferencias entre un método y otro.
Ya que estamos, aprovecho para comentarle cómo detectar y controlar algunos de los errores más comunes al trabajar con este método.
Cuando se utilizan más de tres líneas de posición puede ocurrir que alguna de ellas no participe del polígono —queda por fuera del área definida por las demás—.
La causa de esto puede ser tanto un error humano ocurrido durante la observación o que, al haber continuado avanzando el barco, la línea de posición haya quedado referenciada fuera del marco de las otras líneas de posición.
En ese caso, conviene revisarla para detectar un posible error en su obtención o en su trazado; y, si no se encuentra el motivo, simplemente descartarla asumiendo que esa observación no fue confiable.
Otro punto importante es el tamaño del triángulo o polígono de posición.
Un polígono aceptable es aquel cuyo lado más largo no supera las 0,4 a 0,5 millas. Esto presupone, claro, que las observaciones fueron tomadas con la precisión adecuada —marcaciones con errores no mayores a uno o dos grados, alturas angulares con errores no mayores a seis minutos de arco, por ejemplo—. Si se han respetado esos criterios y, aun así, el polígono resultante tiene dimensiones mayores, entonces corresponde revisar las observaciones o el proceso utilizado para convertirlas en líneas de posición trazables en la carta. Un error típico, por ejemplo, es no haber convertido una marcación magnética o de compás a su correspondiente valor de marcación verdadera.
Posicionamiento por Marcaciones Sucesivas a Un Punto Notable
Este método resulta especialmente útil cuando, por cualquier motivo, solo se cuenta con un único punto notable visible en el horizonte.
A diferencia de los métodos anteriores, en los que la estima de la posición depende exclusivamente de líneas de posición, en este caso se hace intervenir el movimiento del barco —su rumbo y velocidad— para construir la solución.
EL procedimiento para estimar la posición consiste en tomar al menos dos marcaciones consecutivas al mismo punto notable, separadas por un intervalo de tiempo controlado, y combinándolas con una tercera línea de posición generada por el rumbo y la velocidad de la embarcación. Para que el procedimiento funcione correctamente, el barco debe mantener, en la medida de lo posible, su rumbo y velocidad constantes entre ambas observaciones, de modo que la línea de movimiento sea suficientemente confiable y pueda utilizarse como referencia.
La posición se obtiene una vez tomada la segunda marcación al punto notable, trasladando sobre esta la primera marcación mediante una línea paralela desplazada a la distancia realmente navegada entre ambas observaciones, medida sobre la recta del rumbo. El punto donde esta línea paralela corta a la segunda marcación define entonces la posición estimada de la embarcación en el momento de la segunda observación.
Plantearemos un ejemplo para probar el concepto.
planteo
Luego de haber tomado la marcación de las 10:05 hs al faro San Antonio, continuamos navegando tratando de mantener el mismo rumbo compás "Rc" de 010º y la velocidad "Ve" de 5,0 nudos, y luego de 12 minutos —esto es, a las 10:17 hs— tomamos una nueva marcación al faro:
Mcf.S.Antonio
: 273º [10:05 hs]
Con estos datos, deseamos estimar la posición del BV "Primavera" luego de haber tomado la segunda marcación al faro Sam Amtpmop.
El posicionamiento se resuelve de la siguiente manera:
paso 1
Anotar los Datos de Trabajo.
Continuamos con la práctica recomendada de resumir los datos de navegación y las observaciones en la bitácora.
bitácora BV "Primavera"
fecha y hora
: 10:17 25-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 010º
Ve
: 5,0 nudos
observaciones
Mcf.S.Antonio
: 285º [10:05 hs]
Mcf.S.Antonio
: 273º [10:17 hs]
paso 2
Procesar las Líneas de Posición.
Al igual que en los casos anteriores, debemos convertir las marcaciones tomadas con la pínula y, por lo tanto magnéticas, a sus respectivos valores verdaderos.
Mvf.S.Antonio[10:05 hs]
= Mcf.S.Antonio[10:05 hs] + Vt =
= 285º + -10º =
= 275º
Mvf.S.Antonio[10:17 hs]
= Mcf.S.Antonio[10:17 hs] + Vt =
= 273º + -10º =
= 263º
También debemos convertir a verdadero el rumbo compás actual del "Primavera".
Rv
= Rc + Vt =
= 010º + -10º =
= 000º
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Posición.
El primer paso del trabajo gráfico inicia después de haber tomado la segunda marcación, y consiste en llevar a la carta las dos marcaciones tomadas al mismo punto notable.
Trazado de marcaciones sucesivas.
Una vez que se han trazado las marcaciones sucesivas, es decir la tomada a las 10:05 hs, y la siguiente, a las 10:17 hs, el siguiente paso consiste en transportar la primera de las marcaciones al horario de la segunda, proyectándola sobre la recta del rumbo verdadero, a la distancia que se estimó haber navegado durante los 12 minutos transcurridos entre la primera y la segunda marcación.
Para cumplir ese paso debemos entonces calcular la distancia navegada durante esos 12 minutos.
D
= Ve x T =
= 5,0 nudos x 12 minutos / 60 minutos =
= 1,0 millas
Es decir que, en esos 12 minutos se navegó a lo largo de una milla, manteniendo el rumbo y la velocidad.
El paso siguiente es entonces llevar una línea paralela a la primera marcación —la de las 10:005 hs— a una distancia de 1,0 millas proyectada sobre la recta del rumbo. Para ello entonces, trazaremos la recta del rumbo verdadero cortando la marcación de las 10:05 hs, y a una distancia de 1,0 milla de ella, trazaremos su paralela.
La recta del rumbo verdadero puede ser trazada en cualquier lugar del gráfico, siempre que corte la marcación de las 10:05 hs, pues sirve al solo efecto de proyectar la paralela de esa primera marcación a la distancia navegada.
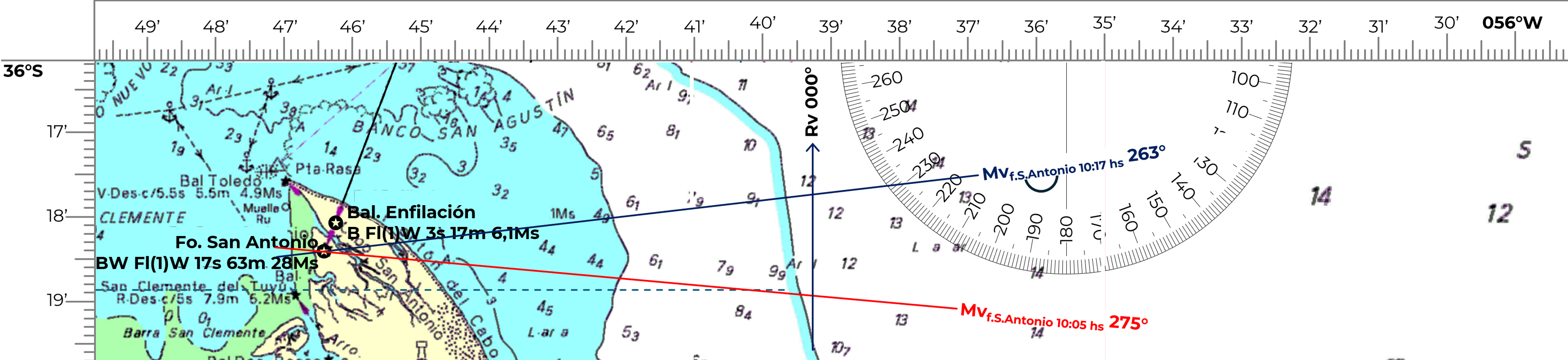
Mostraremos primero el trazado de la recta del rumbo.
Trazado de la recta del rumbo.
Y luego, el trazado de la distancia de 1,0 millas a partir de la marcación de las 10:05 hs. Para ello, se mide primero la medida de 1,0 milla en la escala de distancias sobre los márgenes laterales de la carta, y se traslada esa medida a la recta del rumbo verdadero, con base en la marcación de las 10:05 hs.
Por último, se traza la paralela de la marcación de las 10:05 hs sobre el punto de la distancia navegada en la recta del rumbo, haciendo que esa paralela corte la línea de la marcación de las 10:17 hs.
La posición estimada será aquella donde la proyección paralela de la primera marcación se superpone sobre la segunda marcación.
Trazado de la distancia recorrida sobre la recta del rumbo.
Resuelto este paso final, recuperamos las coordenadas de latitud y longitud del punto donde se cortan la segunda marcación Mvf.S.Antonio[10:17 hs] y la proyección paralela de la primera marcación Mv||f.S.Antonio[10:05 hs] —el símbolo "||" significa "paralela" en este contexto— y actualizamos la bitácora con ellas.
bitácora BV "Primavera"
fecha y hora
: 10:17 25-Nov-2025
Dm2025
: -11º
: +1º
Rc
: 010º
Ve
: 5,0 nudos
posición: LOP
φ
: 36º 17,85' S
ω
: 056º 40,41’ W
La precisión de este método depende principalmente de qué tan bien se haya podido mantener el rumbo y la velocidad entre la lectura de la primera y la segunda marcación. Por su propia naturaleza, este control suele ser bastante fiable cuando se navega a motor, pero puede volverse mucho más incierto cuando se navega a vela, donde pequeñas variaciones en el viento o en el trimado repercuten inmediatamente en la derrota.
Una forma de limitar ese error es tomar las marcaciones sucesivas con la menor separación temporal posible...
¿Cuánto tiempo?
El necesario para lograr al menos unos 6º de diferencia entre la primera y la segunda marcación, de modo que el cruce entre ambas produzca un "punto" razonablemente legible. Si esa diferencia angular fuese menor, la intersección se volvería muy tangencial, dificultando bastante identificar el "punto" que define la posición.
En el ejemplo del texto, por caso, las dos marcaciones se tomaron con un intervalo de 12 minutos, lo que generó una diferencia angular de 12º. El resultado de la superposición de las marcaciones, y cuan fácil o difícil se vuelve su lectura, se ve en la imagen.
Note, ademas, que podría utilizar ambas marcaciones para estimar la distancia al punto notable utilizando la "regla de 1 en 60", y usar esa distancia como una tercera línea de posición, aun cuando no sea muy precisa.
Posicionamiento Utilizando una Línea de Posición definida por una Enfilación
Este método es similar a los procedimientos de posicionamiento que emplean dos o más líneas de posición, con la diferencia de que una de ellas es una enfilación previamente establecida. Puede tratarse tanto de una enfilación expresamente indicada en la carta náutica. así como de una que el navegante deduzca a partir de los puntos notables involucrados, obteniendo así su marcación verdadera desde la carta.
En ambos casos, la enfilación aporta una línea de posición especialmente precisa, pues se la obtiene de la carta, y fácil de identificar, que luego se combina con otras observaciones para determinar la posición del barco.
Apelaremos a recursos ya utilizados para representar el caso.
planteo
Supongamos que, siendo las 16:30 HS del 27 de noviembre de 2025, estamos navegando al Norte del Cabo San Antonio, avanzando a 6,5 nudos con un rumbo compás de 290º.
En el momento en que cruzamos la enfilación formada por el faro San Antonio y su baliza de enfilación, señalada en la carta con la marcación 201º–021º, le tomamos al faro una altura angular, que resulta ser de 0º24’,
Mvenfilación
: 201º–021º
αf.S.Antonio
: 0º24’
Con esta información queremos estimar nuestra posición, combinando el dato cierto de la enfilación con el arco de distancia que se debe obtener a partir de la altura angular "α" medida al faro.
El posicionamiento se resuelve de la siguiente manera:
paso 1
Anotar los Datos de Trabajo.
Resumimos los datos en la bitácora.
bitácora BV "Primavera"
fecha y hora
: 16:30 27-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 290º
Ve
: 6,5 nudos
observaciones
Mvenfilación
: 201º–021º
άf.S.Antonio
: 0º24’º
paso 2
Procesar las Líneas de Posición.
En este caso tenemos dos líneas de posición:
La primera es la enfilación, cuya marcación fue recuperada de la carta y, por lo tanto, es una marcación verdadera, no haciendo falta efectuar ningún otro cálculo o conversión con ella.
La segunda es la altura angular observada al faro San Antonio que, junto con la altura de ese punto notable que figura en la carta —63 metros— servirán para obtener la distancia al faro desde la "Tabla para Hallar la Distancia a un Punto Notable",
Dado que este paso ya lo hemos resuelto en ejemplos anteriores, solo copiaremos el resultado.
Mvenfilación
: 201º
Df.S.Antonio
: 4,1 millas
Con estos dos datos ya podemos avanzar a la resolución gráfica de la posición.
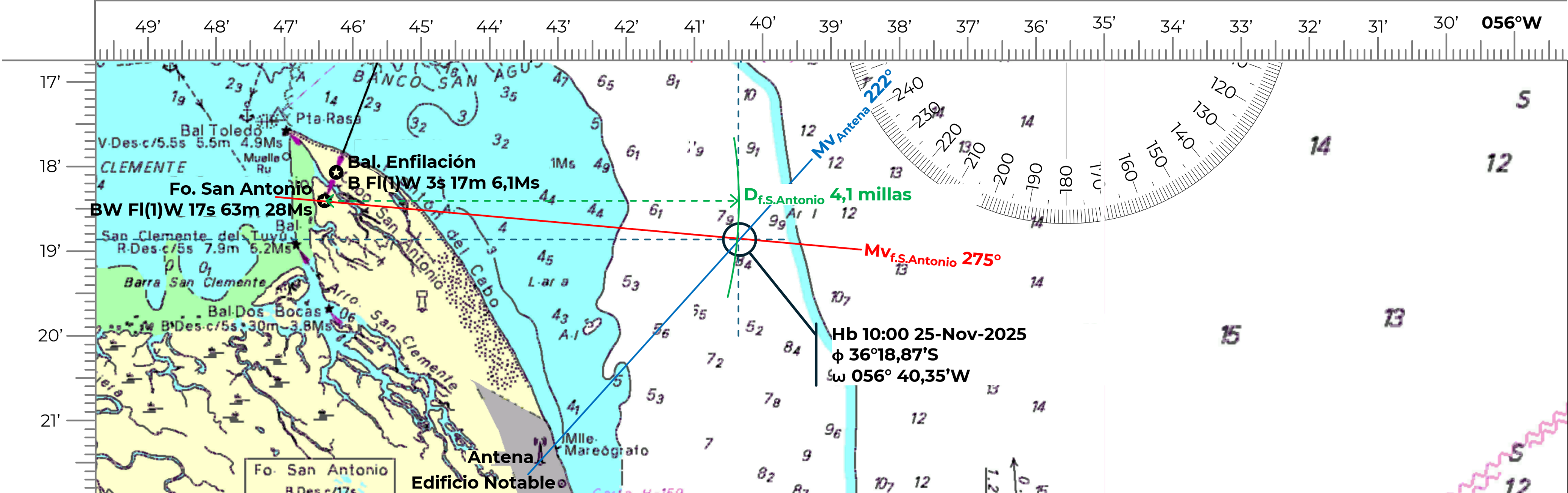
paso 3
Trazar las Líneas de Posición en la carta náutica y Estimar la Ubicación.
Para resolver este caso deben emplearse dos líneas de posición: la enfilación definida por el faro San Antonio y su baliza de enfilación, y el arco de distancia correspondiente al faro San Antonio.
En este ejemplo, la enfilación ya figura dibujada en la carta, de modo que no es necesario reconstruirla —de allí la calidad de exactitud de esa línea de posición—- Basta solo con identificarla y trabajar sobre ella.
El arco de distancia, en cambio, debe ser trazado del mismo modo que en los ejemplos anteriores. Para ello, se mide en la escala de distancias —idealmente con un compás— el valor de 4,1 millas, y luego, apoyando una pata del compás en la posición del faro San Antonio, se traza el arco cortando con él la enfilación preexistente.
El punto de intersección entre ambas líneas de posición constituirá entonces la posición estimada.
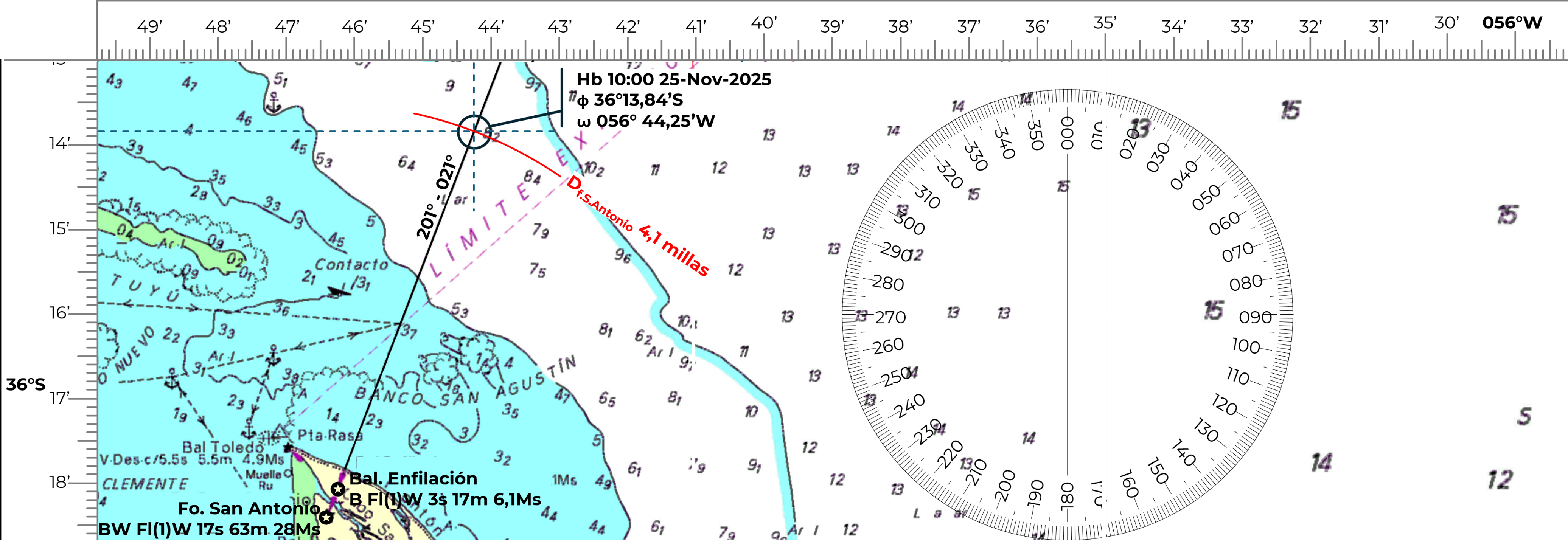
Estima de posición utilizando una enfilación.
Resuelta la estima de la posición, actualizamos la bitácora con las coordenadas de latitud y longitud del punto donde se cruzan la enfilación y la línea de posición adicional —el arco de distancia en este caso—.
bitácora BV "Primavera"
fecha y hora
= : 16:30 hs 27-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 290º
Ve
: 6,5 nudos
posición: LOP Fix
φ
: 36º 13,84' S
ω
: 056º 44,25’ W
Las enfilaciones, más aún cuando están definidas en la carta, son una línea de posición muy confiable para establecer la posición.
Y a su vez, si la combina con otra línea de posición con bajo rango de error, como la del arco de distancia, se puede definir a la posición estimada como "Fix".
Posicionamiento por Demoras
Según su definición, la demora es un ángulo horizontal medido entre la línea de crujía de la embarcación y un punto notable que tenemos a la vista. Esto implica que, para poder representarla en la carta náutica, es necesario conocer previamente el rumbo, ya que este es, a su vez, el ángulo horizontal medido entre el Norte —verdadero, magnético o del compás que incluye su desvío— y la misma línea de crujía desde donde parte la demora.
A su vez, continuando con el repaso de las definiciones, recordamos que la marcación es el ángulo horizontal medido directamente desde el Norte hasta el punto notable. Por lo tanto, rumbo y demora son ángulos consecutivos que, sumados, completan el ángulo total que define la marcación. Esto establece la siguiente relación fundamental:
Mvenfilación
= Rv + Dem
...donde, en un lado de la igualdad, "Mv" es la marcación verdadera, y del otro lado, "Rv" es el rumbo verdadero y "Dem" la demora.
Gracias a esta equivalencia, contamos con dos formas de operar en la carta cuando trabajamos con demoras. Una de ellas consiste en trazar primero la recta del rumbo verdadero, y desde ella medir la demora hacia el punto notable, construyendo así la línea de posición. Y la otra propone convertir la demora en marcación verdadera apelando a la igualdad anterior —es decir, sumándole el rumbo verdadero— y trabajar directamente luego con esa nueva marcación verdadera.
Ambos procedimientos conducen al mismo resultado. Sin embargo, la segunda alternativa: trazando solo la línea de la marcación, en lugar de tener que trazar la del rumbo, y luego la de la demora, ofrece menor posibilidad de errores debidos a imprecisiones en el procedimiento gráfico.
Para ejemplificar el caso, regresaremos al ejemplo del posicionamiento por marcaciones a dos puntos notables, reemplazando una de ellas por una demora.
planteo
A la hora bitácora 10:00 hs 28-Nov-2025, estamos navegando a bordo del velero "Primavera" en aguas del mar Argentino, frente a las costas de la localidad balnearia de San Clemente del Tuyú, con rumbo compás de 190º y a una velocidad de 5,0 nudos.
Tomamos la demora a la Antena de radio visible en la costa, y una marcación con la pínula al faro San Antonio, a fin de estimar nuestra posición.
DemAntena
= 042º (absoluta) [10:00 hs]
Mcf.S.Antonio
= 285º [10:05 hs]
Note que la demora "Dem" está declarada como "absoluta"; eso indica, según su definición, que el ángulo de demora está medido desde la proa del barco, en sentido horario, hasta el punto notable —si hubiese sido declarada como "relativa", indicaría que se la ha medido también desde la proa, pero hacia el lado en el que el punto notable estuviese más cerca, indicando adicionalmente si la demora es a babor o a estribor—.
Por otro lado, debe tenerse en cuenta que la demora fue tomada con un "taxímetro", que es un instrumento mecánico, sin componentes magnéticos, por lo tanto, su valor es siempre verdadero.
Veamos la resolución del caso:
paso 1
Anotar los Datos de Trabajo.
Como siempre, compilamos los datos en la entrada de la bitácora.
bitácora BV "Primavera"
fecha y hora
: 10:00 28-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 190º
Ve
: 5,0 nudos
observaciones
DemAntena
: 042º (absoluta) [10:00 hs]
Mcf.S.Antonio&
; 285º [10:05 hs]
paso 2
Procesar las Líneas de Posición.
En este caso tenemos dos líneas de posición: la marcación observada al faro San Antonio, y la demora absoluta medida a la antena.
El proceso para convertir la marcación a su valor verdadero ya lo hemos hecho en el primer ejemplo de esta nota, por lo tanto, utilizaremos ese mismo valor sin repetir el cálculo.
Mvf.S.Antonio
: 275º [10:05 hs]
En cuanto a la demora, procederemos de acuerdo a lo recomendado, calculando una marcación a la antena a partir de la igualdad ya explicada.
MvAntena [10:00 hs]
= Rv + Dem =
...luego, dado que aún no se tiene el "Rv", ajustaremos la función para incorporar su resolución, como sigue:
MvAntena [10:00 hs]
= (Rc + Vt) + Dem =
= (190º + -10º) + 042º =
= 180º + 042º =
= 222º
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Ubicación.
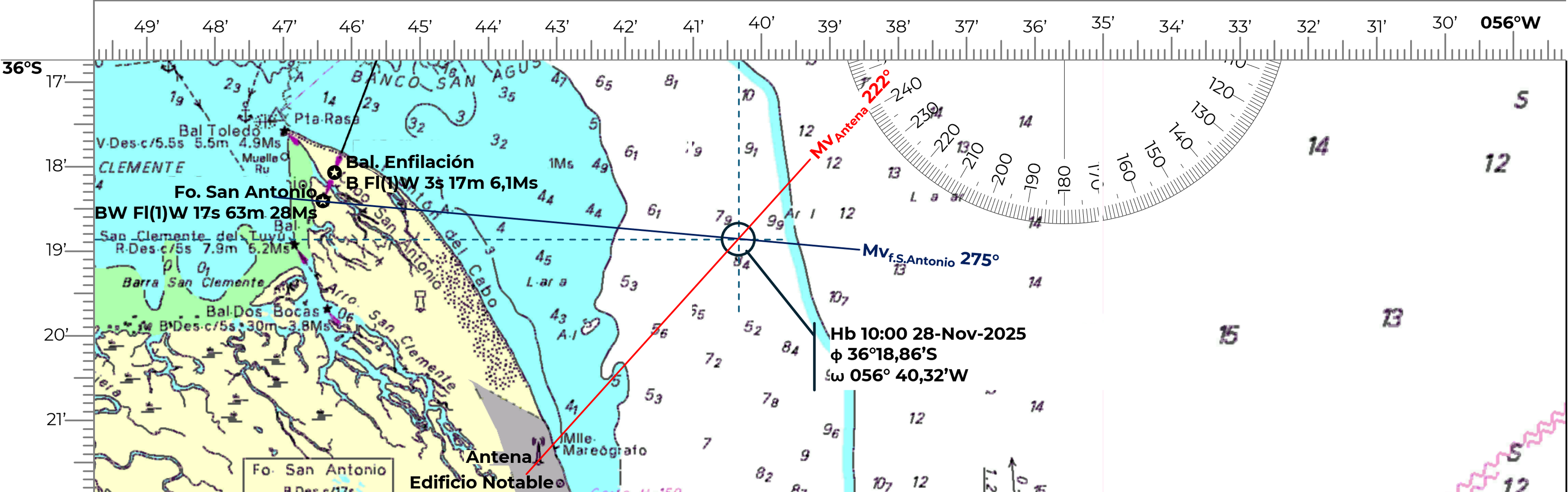
Procedemos ahora a trazar las dos marcaciones que definirán la posición. Esto es, la marcación verdadera observada al faro San Antonio "Mvf.S.Antonio", y la marcación verdadera a la Antena "MvAntena" calculada a partir del rumbo verdadero y la demora absoluta medida a ese punto notable.
Estima de posición utilizando una demora y una marcación verdadera.
Como se ve, el proceso final es idéntico al trazado de una marcación.
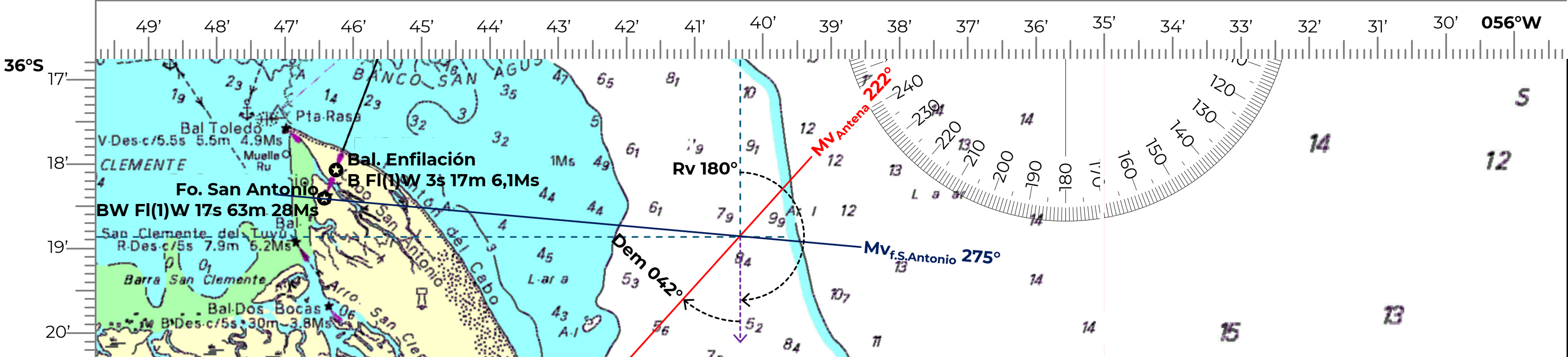
Este gráfico muestra los ángulos horizontales consecutivos correspondientes al rumbo verdadero "Rv" y de la demora "Dem" que, ahora, componen la marcación "Mv" a la Antena.
Composición de la marcación verdadera a la Antena.
Por último, procedemos a actualizar la entrada en bitácora.
Este método de estima de la posición resulta especialmente útil cuando la embarcación navega en zonas donde no existen suficientes puntos notables visibles, o cuando las referencias disponibles no son confiables como para construir líneas de posición precisas. En esos casos, es posible apoyarse en otras fuentes de información que, si bien no están basadas en referencias cuya ubicación es exacta, pueden ayudar a ajustar la posición estimada a un área relativamente acotada.
Una de las referencias externas más utilizadas para este fin es el sondaje. Las cartas náuticas detallan la profundidad del fondo referida al plano de reducción correspondiente a cada zona, por lo que comparar la profundidad observada con la que aparece en la carta puede aportar un dato valioso, acotado a una zona, para confirmar o corregir la estima.
Para demostrar la aplicación de este método plantearemos el siguiente caso:
planteo
A la hora bitácora 10:05 del 28-Nov-2025, navegamos a bordo del velero "Primavera" en aguas del mar Argentino, frente a las costas de San Clemente del Tuyú.
La ecosonda indica una profundidad de 8,5 metros, estables, y al momento de la observación, la altura de marea es de 0,50 metros. Llevamos un rumbo compás de 190º y una velocidad de 5,0 nudos.
Por el través de estribor tenemos a la vista el faro San Antonio, al cual le tomamos una marcación con la pínula de 285º.
Con estos datos deseamos realizar una estima razonable de la posición.
Veamos cómo se resuelve.
paso 1
Anotar los Datos de Trabajo.
Nuevamente, resumimos los datos de trabajo en la entrada de la bitácora.
bitácora BV "Primavera"
fecha y hora
: 10:05 28-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 190º
Ve
: 5,0 nudos
observaciones
P
: 8,5 metros
Hm10:05 hs
: 0,5 metros
Mcf.S.Antonio
: 285º [10:05 hs]
paso 2
Procesar las Líneas de Posición.
En este caso tenemos una línea de posición basada en un punto notable: la marcación al faro San Antonio, y una referencia de sondaje "P" acompañada por la altura de marea del momento "hm".
Utilizaremos el valor de la marcación verdadera al faro ya calculado en otros ejemplos.
Mvf.S.Antonio
= 275º [10:05 hs]
En cuanto a la referencia de profundidad, para definir un segmento de la línea de posición indicada por la marcación en la que se estima debe estar el "Primavera", debemos calcular un valor de plano de reducción de ubicable sobre la carta. Para ello utilizaremos esta igualdad, que proviene de la resolución del "Problema de la Profundidad".
P
= PRS + Hm
...donde "P" es la profundidad, "PRS" es el plano de reducción de sondajes correspondiente a la zona, informado en la carta, y "Hm" la altura de la marea del momento.
Entonces, para calcular el PRS al que debemos acotar la estima, lo despejaremos de esa igualdad.
PRS
= P - Hm10:05 =
= 8,5 metros - 0,5 metros =
= 8,0 metros
O sea, que el "PRS" que debemos ubicar en la carta es uno de 8,0 metros.
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Ubicación.
Haremos ahora la parte gráfica del método, que consiste en trazar la línea de posición, que en este caso es la marcación verdadera al faro San Antonio "Mvf.S.Antonio", y luego definir sobre esa recta, un sector en el que, según nuestro criterio, haya un "PRS" de 8,0 metros —pues no siempre la línea de la marcación pasa exactamente por sobre el PRS que hemos calculado—.
Estima de posición utilizando el PRS.
Como se ve, en este caso no queda definido un "punto" o un "triángulo de posición", sino más bien un segmento de la recta de la marcación verdadera que, al solo criterio del navegante, se encuentran en aguas con un "PRS" de 8,0 metros.
A partir de esto, puede estimarse que el "Primavera" se encuentra en algún punto de ese segmento.
A pesar de ser un método que no es preciso, es muy útil cuando hay que estimar una posición de forma rápida e informal, simplemente para verificar a simple vista en la carta donde estamos navegando.
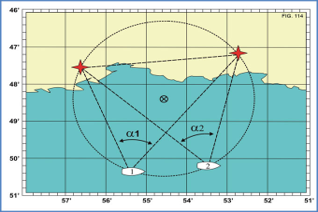
Posicionamiento por Arco Capaz
El arco capaz es una línea de posición formada por un arco de circunferencia —horizontal— que pasa por dos puntos notables cuya ubicación es conocida y está informada en las cartas náuticas. Todos los puntos de dicho arco comparten la propiedad geométrica que, desde cualquiera de ellos, los dos puntos notables se observan bajo un mismo ángulo.
Al mismo tiempo, y como sucede con cualquier otra línea de posición, la embarcación puede encontrarse en cualquiera de los puntos que forman el arco capaz. Hará falta una línea de posición adicional, que corte el arco, para determinar la ubicación específica de la embarcación.
Resumiendo lo dicho en los dos párrafos anteriores, desde cualquier punto en el que pueda encontrarse la embarcación sobre el arco capaz, siempre se medirá la misma distancia o apertura angular hacia los dos puntos notables.
El siguiente ejemplo servirá para explicar el caso, y el método de construcción del arco capaz.
planteo
A la hora bitácora 10:00 hs del 29-Nov-2025 continuamos a bordo del velero "Primavera", navegando frente a las costas de San Clemente del Tuyú, pero ahora con rumbo compás 340º, a una velocidad de 5,0 nudos.
Para estimar nuestra posición, comenzamos tomando primero una marcación de 285º con la pínula hacia una antena de radio visible sobre la costa, ubicada al Sur de la ciudad balnearia y perfectamente identificada en la carta náutica de la zona.
A continuación, y con el sextante en mano, procedimos a obtener el ángulo horizontal formado entre esa antena y el faro San Antonio, con el objetivo de trazar un arco capaz. La medición arrojó un valor de 052º.
Con estas dos líneas de posición —la marcación a la antena y el ángulo horizontal entre los dos puntos notables— estamos en condiciones de resolver la estima de la posición, combinando una marcación con un arco capaz.
paso 1
Anotar los Datos de Trabajo.
Como siempre, en el primer paso resumimos en la entrada de la bitácora los datos relevantes para realizar el trabajo.
bitácora BV "Primavera"
fecha y hora
: 10:00 29-Nov-2025
Dm2025
: -11º
δ
: +1º
Rc
: 340º
Ve
: 5,0 nudos
observaciones
McAntena
: 232º [10:00 hs]
άHAntena-Faro
: 053º [10:05 hs]
paso 2
Calcular las Líneas de Posición.
En este caso solo debe calcularse la conversión de la marcación tomada con la pínula a su valor verdadero, y como ya lo hemos resuelto en un ejemplo anterior, evitaremos repetir el cálculo reutilizando ese resultado.
MvAntena
= 222º [10:00 hs]
El ángulo horizontal "άH" que se utilizará para trazar el arco capaz no requiere ajuste alguno, pues ha sido medido con un sextante que es un instrumento óptico-mecánico, sin componentes magnéticos.
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Ubicación.
La construcción del arco capaz es un tanto compleja, pues requiere cumplir una secuencia de pasos.
Para facilitar su interpretación, mostraremos cada paso por separado, con su gráfico correspondiente, eliminando por el momento la carta náutica de fondo, para que el proceso resulte más claro.
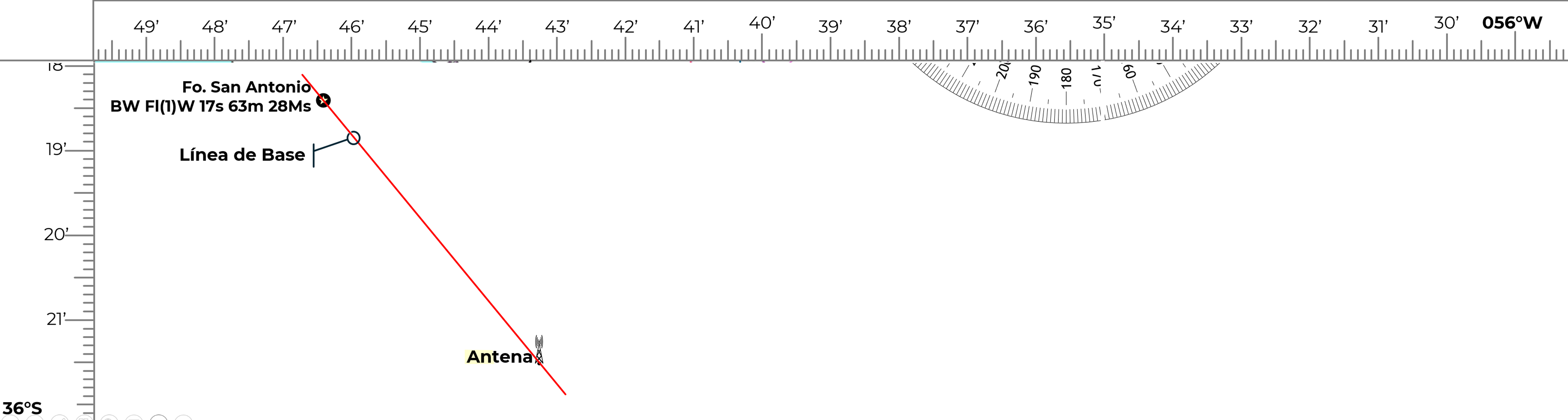
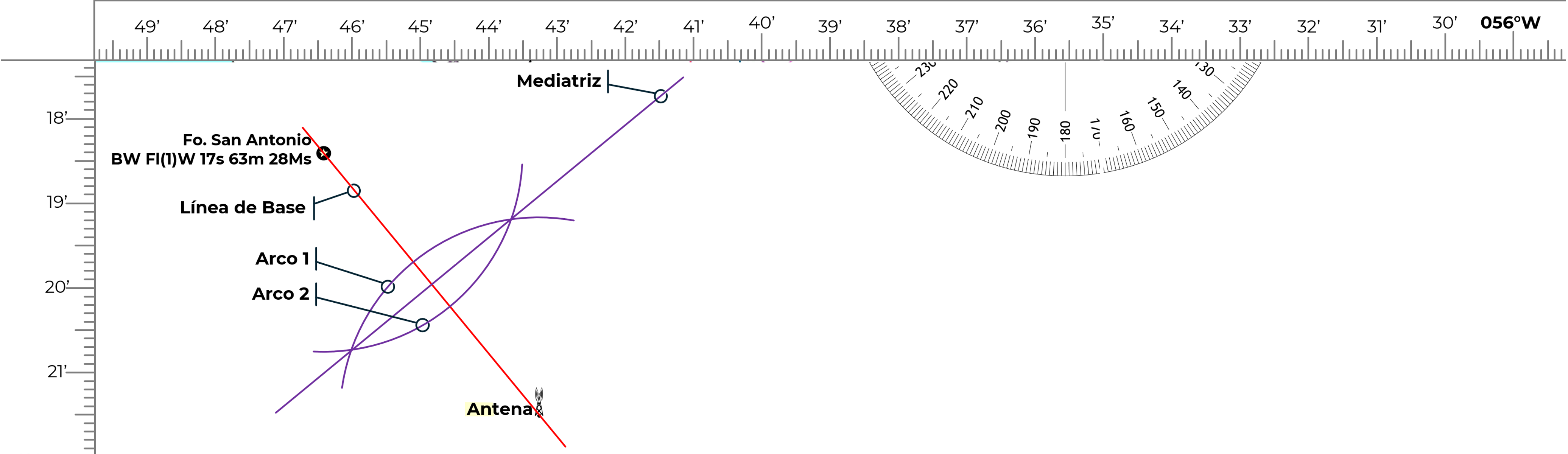
El primer paso consiste en trazar la "línea de base" del arco capaz, que es una recta que debe pasar exactamente por los dos puntos notables a los cuales se les ha medido el ángulo horizontal "άH".
Línea de Base del arco capaz.
Una vez que se ha dibujado la línea de base, debe trazarse su "mediatriz", que consiste en una línea perpendicular a la "línea de base" que la debe cruzar exactamente por su punto medio.
Hay dos métodos simples para ubicar el punto medio de la línea de base por el cual debe pasar la "mediatriz"; uno requiere hacer un cálculo mientras que el otro se resuelve enteramente de forma gráfica.
El método del cálculo consiste en simplemente medir la distancia que tiene la línea de base entre ambos puntos notables, y trazar la "mediatriz" justo por la mitad de esa distancia, utilizando una escuadra para asegurar que la cortará perpendicularmente.
El método gráfico resuelve la mediatriz con el cruce de dos arcos con centro en cada punto notable, y un radio que sobrepase el centro de la "Mediatriz". Mostraremos este método.
Mediatriz del arco capaz.
El "arco 1" tiene su centro en el punto notable faro San Antonio con un radio suficientemente amplio como para que al trazar el "arco 2" se crucen en dos puntos. El "arco 2", a su vez, está centrado en la "Antena" y su radio es el mismo que el del "arco 1". Esto permite trazar fácilmente la mediatriz, haciéndola pasar por los puntos en los que el "arco 1" y el "arco 2" se cruzan.
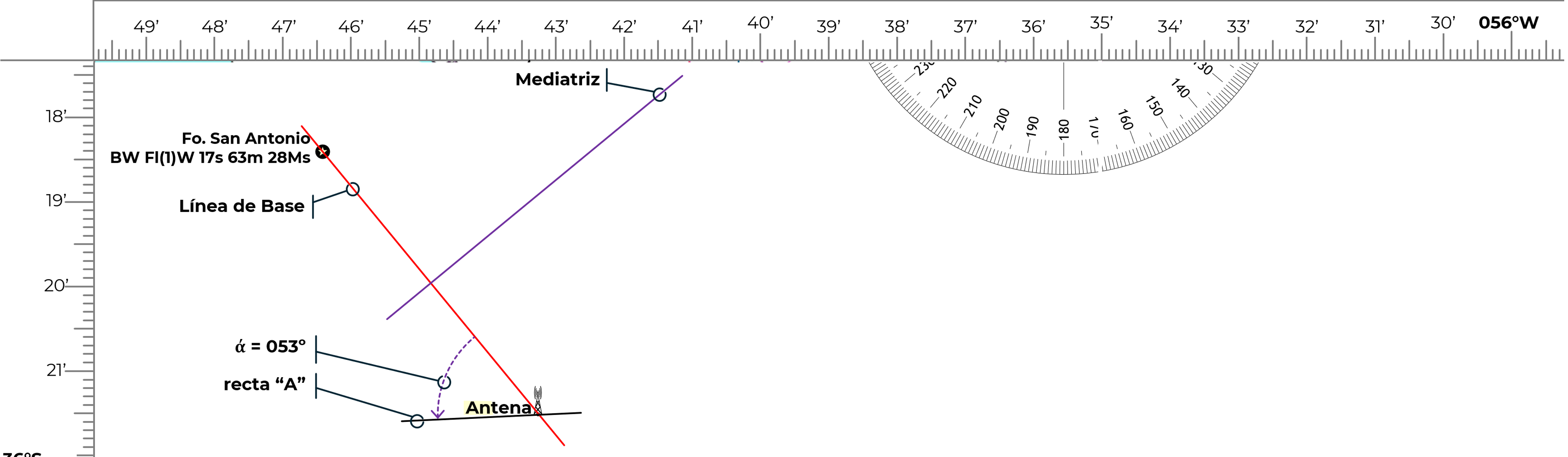
Luego, desde uno de los puntos notables —cualquiera de ellos— se debe trazar una recta, que denominamos recta "A", a un ángulo respecto de la línea de base igual al del ángulo horizontal "άH" medido entre ambos puntos notables —que es de 053º— proyectándola hacia el lado opuesto desde el cual se lo ha tomado —es decir, hacia la costa—.
Para el caso de este ejemplo, proyectaremos la recta desde la Antena. Y reiteramos que puede hacérselo desde el otro punto notable, sin que eso produzca algún inconveniente.
Proyección de la recta del ángulo horizontal.
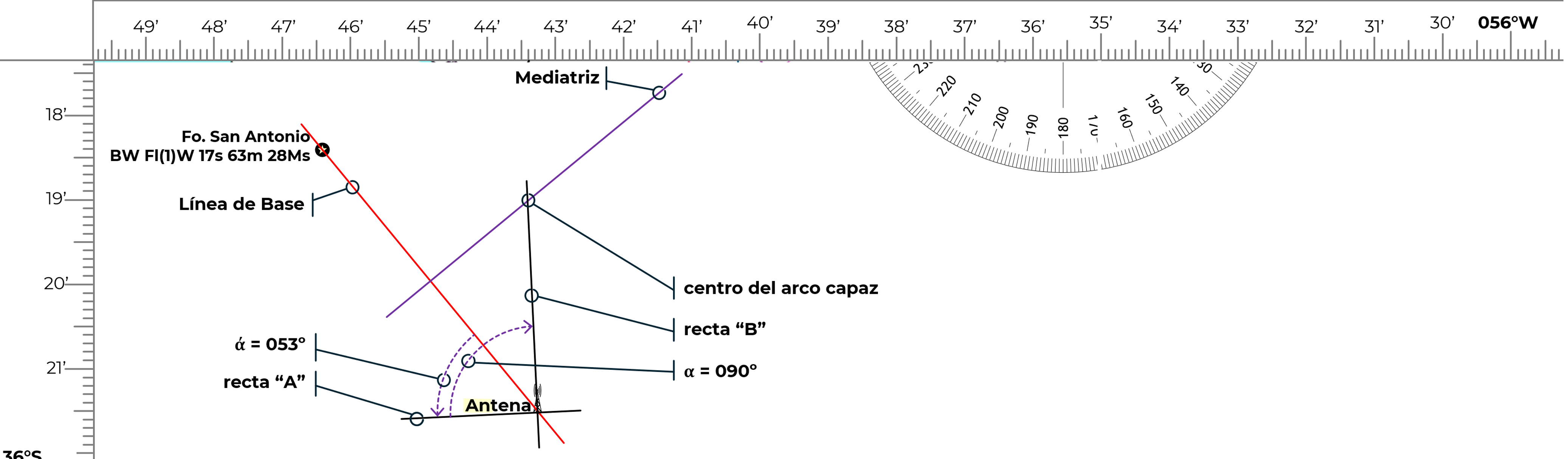
El anteúltimo paso consiste en dibujar, a partir del mismo punto notable y con base en la recta “A”. una nueva recta “B” con un ángulo de 090º que debe cortar la "mediatriz".
Ubicación del centro del arco capaz.
Note que el ángulo entre la recta "A" y la recta "B" es siempre de 090º.
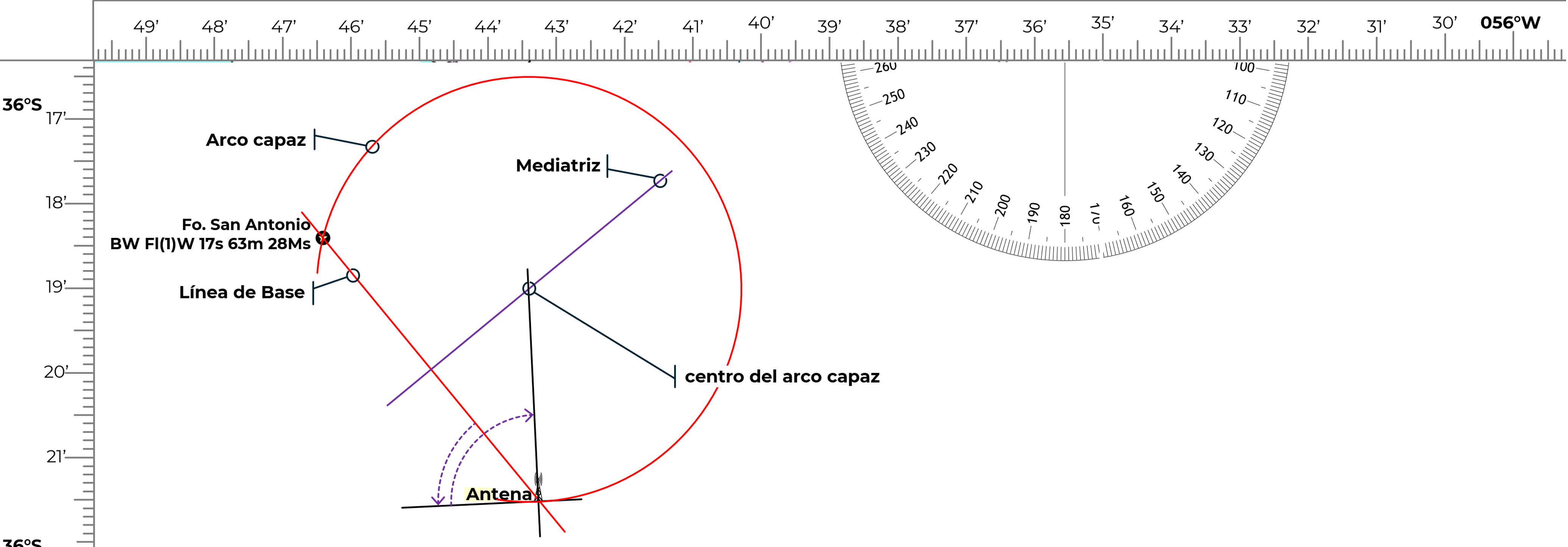
La intersección entre la "mediatriz" y la recta "B", marca el punto desde el cual debe trazarse un arco de circunferencia que. si los pasos anteriores se realizaron correctamente, pasará por ambos puntos notables.
Trazado del arco capaz.
Ese arco de circunferencia define la línea de posición denominada "arco capaz".
Es requisito de exactitud que el "arco capaz" pase por ambos puntos notables. Si esto no ocurre, quiere decir que se ha cometido algún error en los pasos de su construcción.
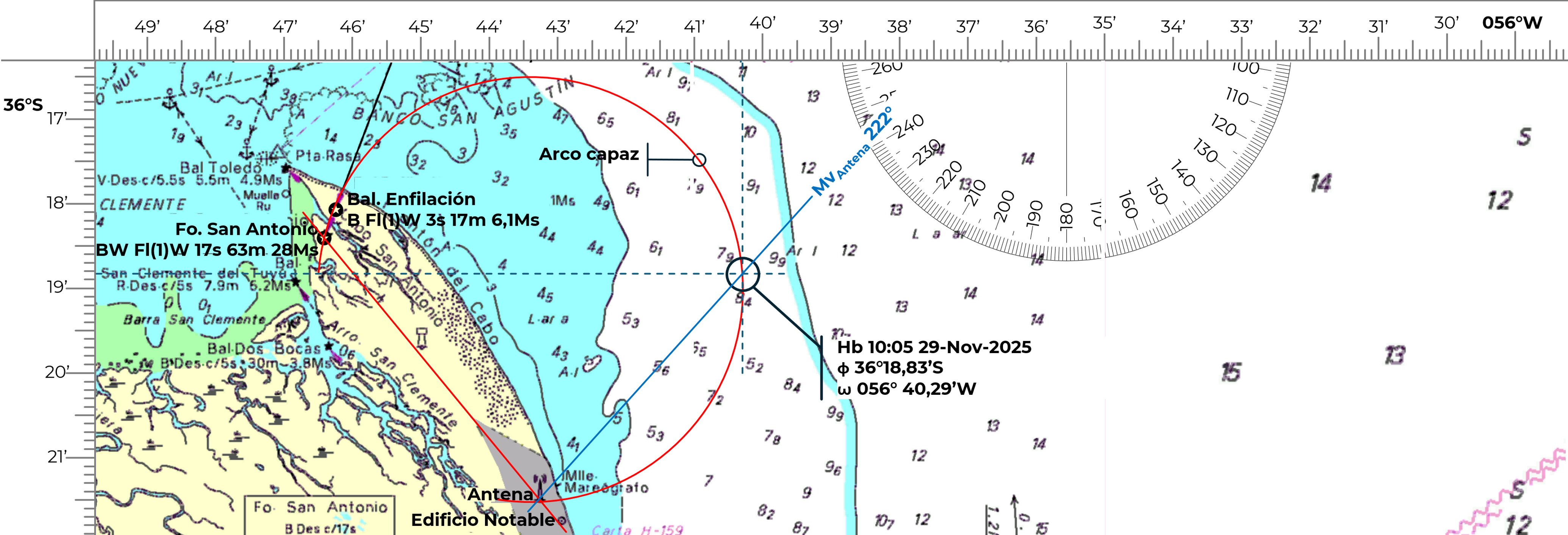
Ya con esta línea de posición resuelta, volvemos a poner la carta en el fondo de la imagen, y trazamos la línea de posición correspondiente a la marcación a la antena "MvAntena[10:00 hs]" para definir el punto en el cual estimamos que se encuentra el "Primavera".
Posición por marcación y arco capaz.
Con la posición ya estimada, podemos actualizar la bitácora.
bitácora BV "Primavera"
fecha y hora
: 10:05 29-Nov-2025
Dm2025
: -11º
: +1º
Rc
: 190º
Ve
: 5,0 nudos
posición LOP ArC Fix
φ
: 36º 18,83' S
ω
: 056º 40,29’ W
El arco capaz es una de las líneas de posición que mayor precisión entrega, obviamente siempre y cuando no se hayan cometido errores en la lectura del ángulo horizontal entre los dos puntos notables participantes del arco.
Y combinándola con una marcación fiable, como en este ejemplo, se obtendrá una estima de posición con mínimo margen de error.
Note que, si hubiese un tercer punto notable en el horizonte, podría tomar otro ángulo horizontal, para definir así la posición cruzando dos arcos capaces.
Abreviaturas para Indicar el Origen de la Posición
n la navegación tradicional, cada posición registrada en la bitácora debe ir acompañada no solo de la hora y las coordenadas, sino también del método con el que se las obtuvo, ya que esto determina el grado de fiabilidad del dato y permite reconstruir la derrota con rigor. La anotación del método se hace mediante abreviaturas estandarizadas y ampliamente usadas por navegantes de todo el mundo, especialmente cuando se combinan técnicas visuales, instrumentos clásicos y sistemas electrónicos.
Así, una posición obtenida mediante "GPS" suele marcarse como "GPS" o "FIX", mientras que una posición obtenida por "estima" se indica como "DR" —Dead Reckoning— o “Est”. Esta notación uniforme permite comprender de inmediato la fiabilidad de cada punto de la derrota y facilita tanto la toma de decisiones en los tramos siguientes de la navegación continua como la posterior reconstrucción o auditoría del viaje.
Estas son las abreviaturas comúnmente utilizadas.
GPS o Fix
Se utiliza para señalar las posiciones obtenidas mediante receptores de GPS.
En la carta se marca la posición con un punto dentro de un círculo, con la anotación "GPS".
El término "Fix" se utilizaba previamente a la aparición de los sistemas de posicionamiento global, para señalar Una posición suficiente precisa y confiable.
LOP (Line Of Position)
Usado para indicar que la posición se obtuvo por dos o más líneas de posición.
LOP Fix: Se aplica cuando la posición "LOP" resulta en un triángulo o polígono de área reducida y suficientemente fiable.
La posición "LOP" se acompaña en general con la abreviatura del tipo de líneas de posición utilizadas para estimarla.
Rv;
Rumbo verdadero.
Dem:
Demora.
Ah:
Angulo horizontal.
ArC:
Arco Capaz.
Snd:
Sondaje.
DR (Dead Reckoning) o Est
Se utiliza para señalar que la posición fue obtenida por estima gráfica.
Rdr o Rdr Fix
Se aplica cuando la posición es resultado de la lectura del RADAR.
Cel o Cel Fix
Si la posición surge de métodos de navegación astronómica.
Esperamos que esta larga explicación le sea útil.
En la próxima nota analizaremos el método de posicionamiento por estima o "dead reckoning", que se aplica navegando fuera de la vista de la costa, sin tener otras referencias o puntos notables a los cuales apelar para resolver la posición.
Mientras tanto, puede entretenerse con este ejercicio.
Este texto forma parte del Manual de Instrucción del Curso de Timonel de Yate de Vela y Motor de la Escuela de Náutica del Club de Veleros Piedrabuena.
 San Isidro, Argentina
San Isidro, Argentina
 CVPB - Jorge Messano
CVPB - Jorge Messano
 14-May-2026
14-May-2026
 46 minutos
46 minutos



 inicio
inicio
 escuela
escuela
 nota anterior
nota anterior
 nota siguiente
nota siguiente

