Manual del Curso de Timonel de Yate de Vela y Motor
San Isidro, Argentina
CVPB - Jorge Messano
22-Abr-2026
43 minutos
Capítulo 03: Navegación
El Problema de la Posición: Navegación electrónica, GPS, AIS y RADAR
Introducción
La navegación ha cambiado de forma notable en las últimas décadas. Donde antes predominaban el sextante y el cronómetro, el compás y la corredera, empezó a aparecer la electrónica ocupa un lugar cada vez más importante. Sin necesidad de grandes inversiones ni instalaciones, muchos navegantes recreativos cuentan ahora a bordo con instrumentos accesibles y fáciles de usar que brindan información precisa en tiempo real.
Una pequeña pantalla de un equipo portátil, o la consola de un instrumento algo más sofisticado, pueden decirnos con exactitud dónde estamos, mostrarnos la profundidad bajo la quilla o ayudarnos a identificar otras embarcaciones en las cercanías. Son herramientas que aportan seguridad y comodidad, y que se han vuelto habituales tanto en salidas costeras como en navegaciones más exigentes.
Vale agregar que, más allá de sus ventajas, estos equipos no reemplazan al navegante —quizás deberíamos hablar del "navegador", pues nos estamos refiriendo al responsable de definir y controlar el plan de navegación—, le aportan información para que este pueda tomar mejores decisiones.
De cualquier forma, el navegante debe conocer los fundamentos a los que corresponden los datos provistos por esos instrumentos.
Navegación electrónica.
En esta nota repasaremos los principales instrumentos de la navegación electrónica —GPS, chartplotter, ecosonda, AIS y RADAR— explicando de forma sencilla para qué sirve cada uno y cómo se integran en la práctica a bordo de embarcaciones deportivas y recreativas.
El GPS - El Sistema de Posicionamiento Global
La navegación por satélite, conocida en conjunto como GNSS —por Global Navigation Satellite Systems— reúne a varios sistemas diseñados para determinar la posición y otros parámetros de la navegación, en cualquier punto del planeta mediante señales emitidas desde constelaciones de satélites en órbita.
Su aparición marcó un cambio profundo en la navegación moderna: dejó de depender exclusivamente de referencias visuales, radiofaros o cálculos astronómicos, para apoyarse en información de posicionamiento provista por dispositivos electrónicos, de forma continua y automática, en cualquier lugar del planeta, mientras se esté a cielo abierto.
Algo de historia.
El desarrollo del Sistema de Navegación Global por Satélite - GNSS tuvo su origen entre finales de la década de 1960 y comienzos de los años 70, como una iniciativa del Departamento de Defensa de los Estados Unidos de América. Su objetivo era crear un sistema de aplicación militar que, basándose en satélites artificiales, permitiera determinar la posición de vehículos y armamento en cualquier lugar del planeta, sin restricciones y con alta precisión.
Vuelo 007 Korean Airlines.
Durante ese período se evaluaron y probaron distintos sistemas experimentales —como Transit, Timation y el proyecto 621B— hasta que en 1973 se aprobó el desarrollo del proyecto NAVSTAR —siglas de Navigation Satellite Timing and Ranging—, que preveía una constelación de 24 satélites —21 operativos y 3 de respaldo— y una red de estaciones terrestres destinadas a controlar la constelación y ajustar la información necesaria para el posicionamiento en tiempo real. El primer satélite NAVSTAR se lanzó en 1978 y se planeaba completar la constelación en la siguiente década. Sin embargo, diversos retrasos y, en especial, el desastre del transbordador espacial "Challenger" en 1986, afectaron el ritmo del despliegue del programa, que finalmente logró alcanzar su capacidad operativa inicial en diciembre de 1993, diez años después de lo previsto.
Si bien el sistema NAVSTAR estaba inicialmente destinado a uso exclusivamente militar, tras el derribo del vuelo 007 de Korean Airlines en 1983 por parte de la Unión Soviética —hecho motivado por un desvío involuntaria de la aeronave hacia espacio aéreo restringido— la administración del presidente Ronald Reagan decidió poner el servicio de GPS a disposición de la aviación civil como medida para mejorar la seguridad aérea. Con el tiempo, la disponibilidad civil se amplió, y las restricciones fueron desactivadas definitivamente en el año 2000, durante la administración del presidente Bill Clinton, abriendo así el uso global del GPS al uso civil, sin limitaciones.
NAVSTAR fue, por tanto, el primer sistema de posicionamiento global plenamente operativo y disponible para uso civil, y heredó el nombre genérico de GPS. Desde entonces, se han incorporado otros sistemas globales, como GLONASS, Galileo y BeiDou, y otros regionales, ampliando la oferta y disponibilidad de servicios de navegación y posicionamiento para todo tipo de aplicaciones civiles.
Constelaciones de los Sistemas de Posicionamiento Global
A la fecha de este artículo —22-Abr-2026— esta es la situación de las flotas de sistemas GNSS en servicio.
NAVSTAR
país:
USA
entrada en servicio:
1995: capacidad operativa plena.
constelación:
31 satélites operativos.
7 satélites de reserva y prueba.
cobertura:
Global.
precisión (uso civil):
estándar: 3,0 a 5,0 metros.
con corrección DGPS, SBAS o DGNSS: 0,5 a 1,0 metros.
con corrección RTK: 0,02 a 0,01 metros (centimétrica) horizontal.
GLONASS
país:
Rusia
entrada en servicio:
1996: capacidad operativa plena.
constelación:
24 satélites operativos
3 satélites de reserva.
cobertura:
Global.
precisión (uso civil):
estándar: 3,0 a 7,0 metros.
con corrección DGPS, SBAS o DGNSS: 1,0 a 2,0 metros.
con corrección RTK: 0,02 a 0,01 metros (centimétrica) horizontal.
BeiDou
país:
China
entrada en servicio:
2020: capacidad operativa plena.
constelación:
44 satélites operativos
sin datos respecto de satélites de reserva.
cobertura:
Global.
precisión (uso civil):
estándar: 2,5 a 5,0 metros.
con corrección SBAS: 1,0 metro.
con corrección RTK: 0,02 a 0,01 metros (centimétrica) horizontal.
Galileo
país:
Unión Europea (UE)
entrada en servicio:
2020: capacidad operativa plena.
constelación:
22 satélites operativos
3 satélites en reserva.
cobertura:
Global.
precisión (uso civil):
estándar: 1,0 metros.
con corrección HAS: 0,2 metros horizontal, 0,4 metros vertical.
con corrección PPP: 0,02 a 0,01 metros (centimétrica) horizontal.
QZSS
país:
Japón
entrada en servicio:
2025: capacidad operativa plena.
constelación:
4 satélites operativos.
cobertura:
Regional: Japón y región Asia y Pacífico.
precisión (uso civil):
estándar: métrica.
combinando con otros GNSS: submétrica.
NavIC
país:
India
entrada en servicio:
2025: capacidad operativa plena.
constelación:
8 satélites operativos.
cobertura:
Regional: India y océano Índico.
precisión (uso civil):
estándar: métrica.
combinando con otros GNSS: submétrica.
Comentarios Adicionales
Consideramos como "satélites operativos" a aquellos que, además de estar en órbita, están emitiendo señales, y marcados como “healthy" —saludable— o "usable” por los controladores de cada sistema.
Además de los satélites operativos, las constelaciones GNSS mantienen satélites de "reserva" —o de backup— para reemplazar unidades que, eventualmente, registren alguna falla o hayan llegado al final de su vida útil.
La precisión está considerada en condiciones favorables, es decir, con cielo despejado, sin interferencias y con un mínimo de cuatro satélites a la vista en una dispersión geométrica ideal.
Componentes del Sistema de Posicionamiento Global
Los Sistemas de Posicionamiento Global se organizan en tres grandes segmentos que trabajan de manera coordinada: el segmento espacial, el segmento de control y el segmento de usuario. Aunque cada constelación tiene sus propias particularidades, esta división es común a todas las constelaciones de sistemas de navegación por satélite.
Segmento Espacial
El segmento espacial está formado por la constelación de satélites que orbitan la Tierra en planos perfectamente definidos.
Esos satélites son los encargados de transmitir las señales de radio que reciben los receptores de los usuarios, y con cuya información definen la posición —entre otras cosas—. Cada constelación cuenta con un número determinado de satélites operativos y otros tantos en reserva, distribuidos en distintos planos orbitales para asegurar cobertura global y disponibilidad constante.
Segmento espacial.
Cada constelación utiliza diferente cantidad de planos orbitales y satélites por plano.
Por ejemplo, NAVSTAR —que es la constelación que conocemos como "GPS"— utiliza 6 planos en órbitas medias —MEO - Middle Earth Orbit, a 20.200 km de altura— con un mínimo de 4 satélites en cada uno.
GLONASS y Galileo, en cambio, solo utilizan 3 planos —también MEO, pero a 19.100 km y 23.200 km de altura, respectivamente— con 8 satélites por plano.
BeiDou es más complejo porque combina planos en MEO, GEO e IGSO —órbita media, geosincrónica ecuatorial y geosincrónica inclinada, respectivamente—.
Las señales de radio y sus características varían según la constelación: el sistema NAVSTAR GPS transmite, por ejemplo, en las bandas L1, L2 y L5, combinando códigos de uso civil abiertos y códigos militares cifrados; Galileo emplea sus propias señales E1, E5 y E6; GLONASS utiliza tradicionalmente una estructura de frecuencias distinta, y BeiDou opera sobre un conjunto propio de bandas. Aunque difieren en detalles técnicos, todos los satélites transmiten básicamente el mismo tipo de información, que consiste en las efemérides precisas del propio satélite, los datos orbitales aproximados del resto de la constelación, la hora del sistema, parámetros ionosféricos y otros mensajes necesarios para que los receptores de los usuarios puedan calcular su posición.
Segmento de Control
El segmento de control reúne a las estaciones terrestres responsables de supervisar el funcionamiento de toda la constelación.
Desde distintos puntos del planeta se monitorea el estado de cada satélite, verificando que permanezca en la órbita asignada, que sus relojes atómicos funcionen dentro de la precisión requerida y que las efemérides se mantengan actualizadas. Cuando se detectan desvíos o fallos, se envían comandos para corregir la órbita o ajustar el reloj, o bien se retira temporalmente un satélite del servicio hasta que vuelva a cumplir los parámetros de calidad, siendo reemplazado por uno de los satélites de respaldo.
Cada sistema GNSS cuenta con su propia red de estaciones de control.
Segmento de Usuario
Finalmente, el segmento de usuario incluye a todos los receptores capaces de procesar las señales GNSS. Desde teléfonos móviles y navegadores portátiles hasta equipos geodésicos de alta precisión, todos ellos comparten la misma función básica: recibir las señales emitidas por los satélites, procesarlas internamente y entregar las coordenadas de la posición del usuario y demás datos.
Segmento de usuario.
Los receptores modernos son notablemente más avanzados que los primeros modelos civiles. Hoy es habitual que puedan operar en múltiples bandas de frecuencia, con decenas de canales de seguimiento y compatibilidad simultánea con varias constelaciones —NAVSTAR (GPS), GLONASS, Galileo y BeiDou— lo que mejora significativamente la disponibilidad y precisión.
Las diferencias entre dispositivos dependen del propósito para el que fueron diseñados: algunos priorizan la sensibilidad y la autonomía, otros la capacidad de almacenamiento, la integración con cartas electrónicas o la posibilidad de recibir correcciones diferenciales que permiten alcanzar precisiones submétricas o incluso centimétricas en aplicaciones profesionales.
Funcionamiento de los Sistemas de Posicionamiento Global
El Sistema de Posicionamiento Global determina una posición mediante un proceso de trilateración —a veces erróneamente llamado "trilateralización"—, es decir, calculando distancias a varios satélites cuya posición es conocida con precisión. Estas distancias se obtienen midiendo el tiempo que tardan en llegar al receptor las señales de radio transmitidas por los satélites, ya que dichas señales viajan a la velocidad de la luz, que es constante.
La trilateración es similar al método de "triangulación", pero basada en los lados de una pirámide triangular.
La triangulación se hace en un plano de 2 dimensiones —valga la redundancia— y devuelve dos coordenadas —latitud y longitud— mientras que la trilateración se hace en un espacio tridimensional dando tres coordenadas—latitud, longitud y elevación—.
Trilateración.
Cada satélite de las distintas constelaciones GNSS se desplaza alrededor de la Tierra siguiendo una órbita muy estable y perfectamente conocida, referida al datum geodésico WGS-84. Así, cada satélite actúa como un punto de referencia o punto notable en el cielo, desde el cual puede trazarse una línea de posición basada en la distancia a dicho satélite.
Esa distancia representa el radio de una esfera imaginaria con centro en el propio satélite; el receptor debe encontrarse en algún punto de la superficie de esa esfera. La intersección de un mínimo de cuatro esferas permite resolver la posición en los ejes de latitud, longitud y elevación y, además, corregir el error del reloj interno del receptor.
Veamos el tema ese de las esferas en más detalle.
Trabajemos primero en dos dimensiones.
Supongamos que tenemos tres puntos notables a la vista y que vamos a estimar nuestra posición en base al trazado de tres "arcos de distancia", uno por cada punto notable.
El resultado es que, luego de trazarlos, obtendríamos tres círculos cuyos bordes apenas se superpondrían formando una figura triangular —aunque con los lados curvados, pues estamos superponiendo círculos—. Ese es el famoso triángulo de posición, y nuestra embarcación estará dentro de su área, ubicada con dos coordenadas.
Ahora bien, supongamos que, en vez de superponer círculos, superponemos esferas.
En ese caso, la superposición, en lugar de formar un triángulo, daría una figura piramidal, y la posición del barco estaría dentro del espacio definido por sus lados, con tres coordenadas.
A nivel del segmento de usuario, es decir en los dispositivos receptores de GPS —el microprocesador encargado del procesamiento— comienza su tarea intentando "escuchar" las señales transmitidas por todos los satélites que tiene a la vista, por encima del horizonte. En condiciones normales, un receptor moderno puede tener entre 10 y 20 satélites visibles simultáneamente, aunque solo necesita un mínimo de cuatro para poder calcular una posición tridimensional y sincronizar su propio reloj interno.
Una vez que el receptor detecta a todos los satélites disponibles, no utiliza a todos por igual, sino que evalúa su geometría espacial —o sea, cómo están distribuidos en el cielo— para elegir los que permitirán obtener una posición más precisa. Esto es, una combinación de satélites bien repartidos en elevación y azimut, evitando que estén agrupados en una misma zona del cielo.
A partir de las señales elegidas, el microprocesador del receptor GPS extrae dos piezas clave:
Las medidas de distancia aparente a cada satélite, obtenidas comparando el tiempo de emisión y de recepción de las señales.
Las efemérides, que indican dónde estaba exactamente cada satélite en el momento en que transmitió la señal.
Con esta información, el microprocesador del receptor calcula, mediante trilateración, la posición del dispositivo en el sistema de referencia WGS-84, corrigiendo continuamente el desfase de su reloj interno.
El resultado de este proceso es un conjunto de datos que el receptor entrega a las aplicaciones que los consumen. Entre ellos se incluyen la latitud, la longitud y la altitud, la velocidad y el rumbo sobre el suelo, la hora UTC, la precisión estimada del cálculo y el estado de la solución —si está basada en NAVSTAR GPS únicamente, en múltiples constelaciones, o si incorpora correcciones diferenciales—. Estos datos constituyen la base sobre la cual, después, trabajan los chartplotters, los sistemas de navegación, las aplicaciones móviles y cualquier otro dispositivo que utilice posicionamiento satelital.
Para curiosos... sabiendo que los satélites de NAVSTAR, por ejemplo, orbitan a aproximadamente 20.200 km de altitud, y que la luz recorre 300.000 km en 1 segundo...
tiempo
= distancia / velocidad =
= 20.200 km / 300.000 km/seg =
= 0.0673333333 segundos
...quiere decir que la señal de radio emitida por un satélite demora unas 67 milésimas de segundo en llegar al receptor GPS.
Luego, si la precisión del GPS es de 5,0 metros, cuál sería el margen de tiempo que corresponde a esa distancia?
300.000 km
= 1 segundo
0.005 km
= 0.005 km / 300.000 km/seg =
= 0.000000016667 segundos =
= 16.667 nanosegundos
...quiere decir que la precisión 5,0 metros corresponde a una diferencia de tiempo de 16.667 nanosegundos.
Y esto implica que para lograr el nivel de precisión que actualmente tienen los GPSs se deben utilizar relojes extremadamente precisos, tanto en los satélites como en los receptores.
Los satélites llevan relojes atómicos que aseguran una precisión del orden de 0.1 nanosegundo, con los que pueden lograrse precisiones del orden de centímetros, pero colocar este tipo de relojes en receptores GPS los haría además de voluminosos extremadamente costosos, por eso en ellos se utilizan relojes más simples, y se corrige la precisión sumando más satélites al proceso de posicionamiento.
Precisión del Sistema de Posicionamiento Global
La mayoría de los receptores comercializados para uso civil, que operan con el servicio estándar de posicionamiento —SPS, Standard Positioning Service—, alcanzan hoy una precisión típica de 3,0 a 5,0 metros en condiciones normales. En receptores modernos que integran señales de más de una constelación GNSS, esta precisión mejora aún más, situándose habitualmente entre 1,5 y 3,0 metros.
La precisión obtenida en la determinación de las coordenadas horizontales —es decir, de latitud y longitud— continúa siendo mejor que la precisión vertical —en altura— que suele degradarse entre dos y tres veces con respecto a los valores horizontales.
Sin embargo, los receptores de GPS de uso civil se desactivan automáticamente cuando detectan simultáneamente velocidades superiores a 1.000 nudos y altitudes mayores a 18.000 metros, con el fin de impedir su empleo en aplicaciones no autorizadas.
Esa característica de auto desactivación fue impuesta por el "CoCom" para evitar que puedan utilizarse en misiles u otros vehículos no autorizados.
El COCOM era el antiguo "Coordinating Committee for Multilateral Export Controls", un organismo internacional que durante la Guerra Fría regulaba la exportación de tecnología sensible. Aunque CoCom ya no existe, el nombre quedó asociado a esta limitación.
Navegación con Sistemas de Posicionamiento Global
En la navegación electrónica, los receptores GPS, chartplotters y aplicaciones electrónicas permiten registrar, organizar y seguir posiciones geográficas con una precisión y facilidad impensadas en la navegación tradicional —no electrónica—. Para hacerlo, utilizan una serie de elementos lógicos que estructuran la información de posicionamiento y permiten planificar o reconstruir una derrota.
Definiremos a continuación estos parámetros.
Waypoints
Un waypoint es una referencia geográfica que identifica un "punto" en un plano mediante sus coordenadas de latitud y longitud, o un punto en el espacio incorporando además su elevación.
Además de las coordenadas, cada waypoint puede almacenar datos adicionales que facilitan su identificación y contexto de uso, tales como:
Nombre del Waypoint
En equipos relativamente antiguos, el nombre del waypoint está limitado a solo algunos caracteres, por lo cual es habitual leerlos en ellos como siglas. En equipos más modernos, que disponen de más memoria interna, los nombres ya pueden ser más descriptivos.
Tipo o Categoría
Este dato permite clasificar el waypoint según su función; por ejemplo, indicando si es un waypoint de "ruta", o de "seguridad", para indicar en este caso si forma parte de una ruta o si es una referencia para el navegante, respectivamente; en otros equipos se los clasifica por el tipo de referencia, por ejemplo: boya, zona de fondeo, puerto, obstáculo, peligro aislado, u otros.
Ícono o Símbolo
Este tipo de dato suele estar disponible en equipos más modernos, y son figuras destinadas a dar una representación visual del waypoint en la carta náutica.
Comentarios
Este campo permite anotar información relevante sobre el punto en cuestión.
Orden o secuencia
Cuando el waypoint integra una ruta, este dato indica el orden en el que debe ser considerado.
El dato "Orden" o "Secuencia" formaba parte de la estructura de información del waypoint en las primeras versiones de su especificación. Actualmente, aunque se lo mantiene para mantener la compatibilidad con softwares de versiones anteriores, ya no se lo usa como parte de la información del waypoint, pues fue incorporado a la estructura de información de la "ruta", que es donde debe estar desde el punto de vista lógico.
Un waypoint puede tanto marcarse sobre una carta en papel o sobre una carta electrónica, en cuyo caso sus coordenadas serán procesadas por el receptor GPS o chartplotter que utilice dicha carta.
Rutas
Una ruta es un recorrido o derrota compuesto por una secuencia ordenada de waypoints —o puntos definidos por coordenadas con sus comentarios— que deben ser seguidos en el orden establecido, navegando idealmente en línea recta desde uno hacia el siguiente.
Además de los waypoints que la conforman, una ruta suele incluir otros datos relevantes:
Nombre de la Ruta
Almacena el nombre que el usuario quiere darle a la ruta en cuestión.
Comentarios
Este es un campo que permite describir más ampliamente la ruta en cuestión.
Es una buena práctica anotar la fecha de creación o de la última actualización de la ruta en el campo de "Comentarios" o en el "Nombre".
Esto servirá, luego, como una referencia para entender si esa ruta puede ser considerada confiable respecto de los posibles cambios que pudiesen haber surgido desde su creación.
Las rutas pueden trazarse tanto sobre una carta en papel o en un croquis de navegación, como sobre una carta electrónica. En este último caso, la ruta puede ser interpretada por el receptor GPS o chartplotter para asistir al navegante en el seguimiento del recorrido planificado.
Tracks
Un track —o trazado— es una secuencia de puntos registrados automáticamente por un receptor GPS, cada uno definido por sus coordenadas de latitud, longitud y, cuando corresponde, elevación. Esta secuencia permite reconstruir con precisión el recorrido realmente efectuado.
Un track suele complementarse con otros datos, tales como:
Nombre del Track
Es la identificación con la cual se almacenará el "track" en el dispositivo.
Fechas y Horas
Contiene la fecha del inicio y del final del registro del track.
Velocidades
Almacena las velocidades mínima, máxima y promedio registradas en el track.
Alturas
Registra las alturas o variaciones de elevación a lo largo del track, cuando el dispositivo las registra.
Waypoints, rutas y tracks.
Cartas Electrónicas
El siguiente paso lógico en la evolución de los receptores GPS surgió a partir de su integración con otros sistemas para lograr así producir otro tipo de información útil para el usuario.
En la náutica, esta asociación dio origen a los charplotters o sistemas de navegación electrónica que son aplicaciones que integran los datos provistos por el GPS sobre cartas digitales permitiendo elaborar información más compleja, establecer waypoints y rutas, y seguirlas de forma automática, conociendo la velocidad y rumbo en cada instante, sumando los datos de otros sistemas tales como ecosondas o sensores meteorológicos, con el valor que ello implica.
Esa evolución hizo necesario que las cartas náuticas que se distribuían impresas en papel tuviesen que ser adaptadas a formatos digitales para poder ser integradas a los sistemas de navegación electrónica.
Existen dos tipos de cartas náuticas digitales:
Cartas Ráster
Usualmente conocidas con la sigla RNC, por Raster Nautical Chart, son imágenes digitalizadas de las cartas oficiales impresas en papel, sin interpretaciones ni modificaciones. Su elaboración sigue la Especificación de Producto RNC S-61 de la OHI —Organización Hidrográfica Internacional—.
Estas cartas son una copia fiel de las cartas oficiales en papel, manteniendo exactamente el mismo diseño, símbolos y colores. Sin embargo, pierden definición al ampliarse —la imagen se pixela— ya que se trata de imágenes estáticas.
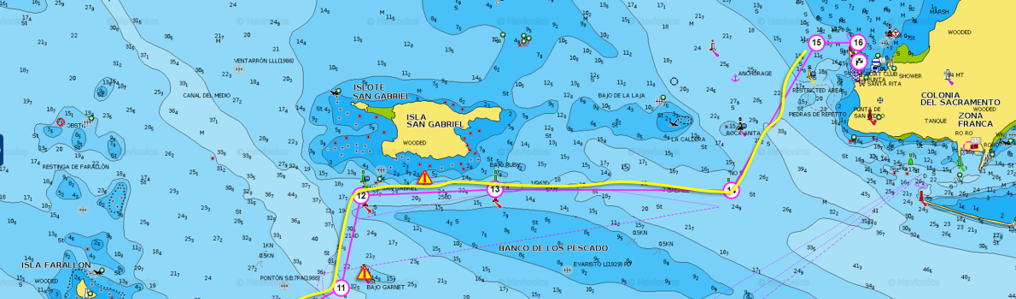
Las cartas ráster corresponden al enfoque más tradicional: reproducen la carta en papel tal como la concibió el servicio hidrográfico oficial, con la misma estructura, simbología y escala. Esto resulta especialmente útil para quienes están habituados a interpretar la cartografía clásica, o para disponer de un respaldo digital idéntico a la carta impresa.
Carta raster acceso a Laguna, en Brasil.
Cartas Vectoriales
Las cartas náuticas vectoriales, llamadas ENC, por Electronic Navigational Chart, son representaciones digitales construidas a partir de objetos gráficos —puntos, líneas, áreas— georreferenciados según el Estándar S-57 de la OHI, y su evolución S-101 para los próximos años.
Su gran ventaja es que no se deforman ni pierden claridad al ampliarse, ya que su contenido es "recalculado" al instante. Además, pueden mostrar u ocultar información según el nivel de zoom o del tipo de presentación. El inconveniente de esta característica es que no muestran automáticamente la cartografía y sus detalles de escalas menores a la hoja cargada; si se amplía más allá de su escala de compilación, puede aparecer menos información de detalle que la esperada.
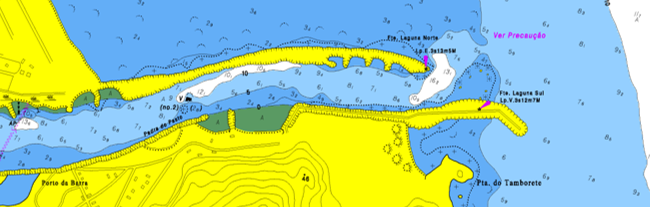
Las cartas vectoriales surgen como un producto nativo digital. No representan una imagen fija, sino una base de datos cartográfica que el sistema interpreta dinámicamente: cada boya, sonda, límite o peligro está almacenado como un objeto con atributos propios. Esto permite funciones adicionales, como activar alarmas de proximidad a un objeto, consultar detalles específicos de los elementos o adaptar la densidad de información a la escala seleccionada.
Carta vectorial acceso a Laguna, en Brasil.
En la práctica, en la navegación moderna, se combinan ambos enfoques: las ENC oficiales alimentan a los sistemas ECDIS y a los chartplotters certificados, mientras que los navegantes deportivos suelen utilizar además cartografía vectorial comercial —como Navionics, C-Map o BlueChart— que, sin ser oficial, ofrece una visualización más amigable y actualizaciones más frecuentes para el uso recreativo.
El AIS
AIS.
El AIS —Automatic Identification System— es un sistema de ayuda a la navegación diseñado para mejorar la seguridad marítima, permitiendo que los buques transmitan y reciban en tiempo cuasi-real datos tales como la identificación del barco, su posición, rumbo y velocidad, puerto de origen y destino, entre otros. Esta información, compartida mediante radio en VHF, facilita la prevención de colisiones, el ordenamiento del tráfico en zonas congestionadas y la gestión por parte de autoridades portuarias y servicios de control marítimo.
Dada su utilidad operativa y de seguridad, en 2002 la OMI —Organización Marítima Internacional— estableció su uso obligatorio en todos los buques mercantes de más de 300 toneladas brutas y en todos los buques de pasajeros.
Luego, en 2018, la Prefectura Naval Argentina, incluyó el AIS como uno de los dispositivos obligatorios a bordo, para navegaciones de tipo oceánicas.
El sistema obtiene los datos que transmite desde dos fuentes: por un lado, mediante los datos ingresados por el usuario, como el MMSI, el nombre del buque, el puerto de origen y el de destino, tipo de carga y condición de navegación; y por otro lado, por los datos dinámicos procedentes del GPS, que suministran posición, rumbo y velocidad en tiempo real.
Los receptores AIS muestran esta información sobre cartas electrónicas —generalmente de tipo vectorial— o pantallas dedicadas, permitiendo visualizar la embarcación propia y las circundantes dentro del alcance típico de las comunicaciones VHF.
La transmisión se efectúa en dos tipos de transpondedores:
Transponder clase "A"
Obligatoria para buques que cumplen con el convenio SOLAS.
Transmite información dinámica —posición, rumbo y velocidad— cada 2 a 10 segundos mientras navega y cada 3 minutos cuando está fondeado, mientras que los datos estáticos —datos de identificación del buque, puertos de origen y destino, tipo de carga, entre otros— se emiten cada 6 minutos. Opera en VHF a 12,5 Watts y requiere sensores adicionales como un GPS externo, indicador de rumbo y velocidad de giro.
También admite mensajería de seguridad.
Transponder clase "B"
Orientado a embarcaciones menores y de recreo, mantiene compatibilidad plena con la Clase "A", pero transmite a menor potencia —2,0 Watts— y con intervalos más amplios: entre 30 y 180 segundos para datos dinámicos y 6 minutos para los datos estáticos.
No exige sensores adicionales ni funciones avanzadas, aunque algunas —como la mensajería de seguridad— pueden estar disponibles según la configuración del equipo.
El convenio SOLAS —sigla que ingles significa "Safety Of Life At Sea", es decir "Seguridad de la Vida en el Mar" en español— es la norma internacional que establece los requisitos mínimos para garantizar la seguridad para la vida humana en el mar.
El AIS y la Prevención de Abordajes
El AIS, como sistema cooperativo de identificación automática, cumple una función importante en la prevención de abordajes ayudando a controlar el tráfico que circula alrededor del barco. Cada embarcación equipada con AIS transmite su posición, rumbo, velocidad e identidad, y al mismo tiempo recibe la información transmitida por los demás buques. Con estos datos, el equipo AIS realiza de manera continua cálculos relativos entre la embarcación propia y cada contacto detectado, evaluando si las trayectorias actuales podrían derivar en una aproximación peligrosa.
AIS: Círculos de seguridad.
El mecanismo central de esta función se basa en dos parámetros fundamentales: el CPA, que indica la distancia mínima a la que pasarán dos buques si mantienen rumbo y velocidad constantes, y el TCPA, que expresa el tiempo que falta para alcanzar ese punto de máxima aproximación. A partir de estos valores, el sistema determina si la situación futura es segura o si, por el contrario, existe la posibilidad de un encuentro demasiado cerrado. Cuando el CPA previsto es inferior a un límite preestablecido, y al mismo tiempo el TCPA cae dentro de un período crítico seleccionado por el navegante, el AIS interpreta que hay riesgo de colisión.
Es en este contexto donde aparece el concepto del “círculo de seguridad”. Este no es un círculo físico en el mar ni una representación obligatoria en pantalla, sino una idea operativa: es un conjunto de umbrales que definen cuándo el AIS debe emitir una alarma para llamar la atención del navegante. De manera práctica, ese círculo se establece configurando una distancia mínima aceptable —por ejemplo, una o dos millas náuticas— y un tiempo máximo al punto de mayor aproximación —por ejemplo, quince minutos—. Si el cálculo predice que otro buque ingresará dentro de ese espacio virtual, el AIS activará una alarma porque la aproximación prevista es demasiado estrecha. En muchos sistemas, esta situación se complementa con un aviso preliminar cuando un contacto ingresa a un rango general de vigilancia, lo que permite al navegante seguir su evolución antes de que se convierta en una amenaza real.
Cuando finalmente se cumplen las condiciones que definen un riesgo, el equipo genera una alarma sonora y visual, resalta el blanco en pantalla y muestra claramente la trayectoria prevista, facilitando que el capitán evalúe la situación conforme al Reglamento Internacional para Prevenir los Abordajes. La idea es proporcionar información precisa y con suficiente antelación como para tomar una decisión fundamentada, ya sea una maniobra temprana de alteración de rumbo, una reducción de velocidad o simplemente mantener una vigilancia reforzada mientras se espera la evolución del contacto.
Es importante recordar que el AIS sólo puede advertir sobre embarcaciones que transmiten su propia señal. Kayaks, veleros menores sin AIS, boyas derivantes o pesqueros artesanales que no lleven un equipo AIS no serán detectados por este sistema, del mismo modo que un AIS mal configurado o con antena deficiente puede generar datos erróneos.
Por ello, aunque el AIS es extraordinariamente eficaz para anticipar riesgos de colisión, no sustituye la vigilancia visual ni al radar: los complementa y enriquece, permitiendo al navegante tomar decisiones con un grado de precisión y anticipación que antes sólo era posible mediante cálculos manuales o experiencia acumulada.
Ecosonda
La ecosonda es un instrumento que permite medir la profundidad mediante un haz de ultrasonido. Su principio de funcionamiento se basa en el eco acústico, donde un transductor emite pulsos sonoros hacia abajo, estos rebotan en el fondo —o en objetos intermedios— y regresan al sensor, que mide el tiempo de retorno para calcular la distancia.
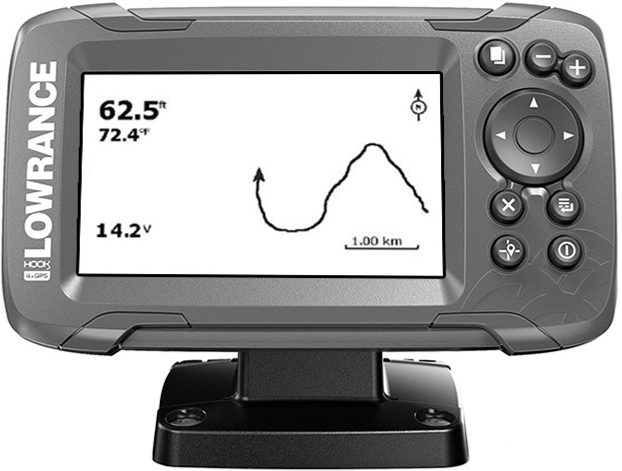
Ecosonda.
En términos físicos, la relación es directa:
P
= (V x T) / 2
...donde "P" es la profundidad, "V" es la velocidad del sonido en el agua, que es de aproximadamente 1.500 metros por segundo —con variaciones según la temperatura, salinidad y presión— y "T" el tiempo transcurrido entre emisión y recepción del eco. El factor "2" de la división aparece porque el pulso recorre el trayecto de ida y vuelta.
El corazón del sistema es el transductor de tipo piezoeléctrico, que cumple una doble función: convierte energía eléctrica en ondas acústicas y, luego, las vibraciones de retorno nuevamente en señales eléctricas.
La ecosonda no solo mide la profundidad; también interpreta la intensidad y forma de los ecos. En la pantalla, el fondo aparece como una línea continua cuyo grosor e intensidad indican su dureza, basado en el hecho de que fondos duros reflejan más energía que fondos blandos. Los objetos en la columna de agua, tales como peces, vegetación, o estructuras, generan ecos intermedios. En equipos recreativos, estos ecos suelen representarse como arcos o manchas, resultado del paso del objeto por el cono del haz acústico.
El haz acústico tiene forma cónica, que se abre hacia el fondo. Su ángulo de apertura depende de la frecuencia utilizada.
Frecuencias Altas
Frecuencias de, por ejemplo, 200 kHz, generan un haz cónico más estrecho, dando mayor resolución, pero de menor alcance.
Este tipo son deales para aguas poco profundas.
Frecuencias Bajas
Frecuencias de, por ejemplo, 50 kHz, generan un haz cónico más amplio, con menor detalle, pero mayor penetración y alcance en aguas profundas.
Los equipos modernos suelen trabajar con múltiples frecuencias o tecnologías como CHIRP —barrido de frecuencias—, que mejora notablemente la discriminación de blancos y la claridad de la imagen.
La pantalla de la ecosonda muestra la profundidad que el transductor va detectando, en la unidad de medida que le haya sido configurada. Adicionalmente, puede mostrar en forma gráfica el relieve del fondo y los objetos detectados en las aguas intermedias.
Además, la mayoría de las ecosondas modernas permiten configurar alarmas, para alertar al navegante que se está ingresando en zonas con profundidades menores a un determinado nivel establecido.
Instalación
Según el tipo de embarcación y precisión buscada, el transductor de la ecosonda puede ir montado en el espejo de popa directamente sumergido en el agua, o bien en colocados internamente en un orificio pasante en el casco o, incluso, adherido al casco —sin necesidad de perforarlo— con algún tipo de sellador que impida que la señal se disperse.
Luego de instalada, especialmente cuando se lo ha hecho en el interior, sobre el casco, conviene configurar el "offset", que es la diferencia de altura entre la superficie del agua y la profundidad a la que ha quedado el transductor, a fin de que la ecosonda sume esa diferencia a la profundidad que va midiendo, mostrando así valores finales de profundidad.
El RADAR
Radar.
El radar —abreviatura de RAdio Detection And Ranging— es uno de los equipos más importantes por su aporte a la seguridad en la navegación, pues permite visualizar todo lo que rodea a un buque tanto de día como de noche, en cualquier condición meteorológica, siendo sin duda uno de los mejores sistemas para evitar colisiones.
El radar marino funciona emitiendo un haz de microondas puntual de alta frecuencia e intensidad, barriendo el horizonte alrededor del barco, detectando el eco de la señal reflejada por los objetos del entorno, a partir del cual se calcula la demora o la marcación —según como se lo haya configurado— y la distancia a ellos.
La señal de radio se refleja en objetos ubicados en el plano horizontal como así también en formaciones nubosas en altura, sirviendo así para poder detectar y rastrear tormentas tanto de día como de noche.
Los radares marinos operan en dos bandas de frecuencia de SHF —Super High Frecuency—:
Banda "S"
Que va de los 2,0 GHz a los 4,0 GHz, con una longitud de onda entre los 8,0 y 15,0 centímetros.
Banda "X"
Que va de los 5,2 GHz a 10,9 GHz, con una longitud de onda de entre 2,5 cm y 4,0 centímetros.
Entre estas dos, la mayoría de los radares marinos operan en la banda "X" pues proporciona mayor resolución de detección.
Le explico lo de la resolución:
Fíjese que la longitud de onda de la Banda "S" es de entre 8, y 15,0 centímetros, por lo tanto, el rebote de la señal siempre mostrará un tamaño de "blanco"... es decir, del objeto que reflejó la señal, de ese tamaño
La Banda "X" tiene una longitud de onda mucho más pequeña, por lo tanto, va a obtener reflejos más detallados de los "blancos" en los que rebota la señal.
Ese nivel de detalle es el que define la resolución.
Los componentes de un radar son:
Transmisor
Es un transmisor de radio de alta frecuencia, antiguamente basado en un magnetrón y actualmente en componentes de estado sólido.
El magnetrón era —en realidad, sigue siendo— un tubo de vacío que emite un pulso potente de microondas, del orden de los 4.000 watts, en un lapso extremadamente breve —1/100 del tiempo— mientras que un transmisor de estado sólido emite un pulso continuo de baja potencia, del orden de no más de 10 Watts, y banda extendida.
La tecnología de estado sólido es más eficiente tanto en términos de consumo de energía como en la definición de la imagen del objeto reflejado.
Antena
La antena es el elemento del radar que emite la señal de radio y recibe su rebote.
El núcleo de la antena es una "guía de onda" que transporta la energía de microondas generada por el transmisor hasta un "alimentador" o "feed" ubicado en el centro de la antena, que es el encargado de irradiarla hacia un reflector metálico, que generalmente tiene forma de "barra" alargada. Este reflector da forma al haz, concentrándolo en el plano horizontal y abriéndolo en el plano vertical para tolerar cabeceo y rolido del barco.
Todo ese conjunto está montado sobre un eje vertical y que le permite girar continuamente a una velocidad que va, típicamente, de entre 16 a 36 rpm.
Además, el radar necesita saber con precisión en qué dirección está apuntando el haz en cada instante. Para eso incorpora un sensor de posición angular, que genera impulsos sincronizados con la rotación. Esto le permite al radar correlacionar cada eco recibido con un rumbo exacto.
Radar en radomo.
Luego, todos esos elementos: la antena en sí misma, el motor que la hace girar, las guías de onda, y los acoplamientos, pueden presentarse en un dispositivo de tipo "radomo" o de "scanner abierto".
EN los de tipo "radomo", esos elementos están encapsulados dentro de una cúpula protectora de material plástico transparente a las microondas, mientras que en los de "scanner abierto" están contenidos en una barra también del mismo material, que se la puede ver girar.
Las de tipo radomo son más adecuadas para veleros y pesqueros, pues su capsula redondeada evita que el velamen y la jarcia o los aparejos de pesca se enreden en la antena. Son de bajo consumo de energía, lo cual es fundamental para embarcaciones que naveguen en rutas de larga distancia con recursos de energía limitados.
Las de tipo scanner abierto se suelen utilizar en embarcaciones de gran tamaño, pues proveen un mejor rendimiento y alcance, con mejor resolución y separación de ecos.
Pantalla
La pantalla del radar es la interfaz donde el navegante puede ver e interpretar los ecos recibidos. Su representación clásica es una vista en planta, como si se observara el barco desde arriba, ubicada en el centro o algo desplazado —según su configuración— y los ecos distribuidos alrededor en función de su distancia y dirección.
El elemento principal es la imagen radar propiamente dicha, formada por ecos que aparecen como manchas, puntos o trazos. Su intensidad —brillo o color— representa la fuerza del retorno: ecos grandes o cercanos suelen verse más definidos, mientras que objetos pequeños, lejanos o con mala reflectividad aparecen más débiles. La pantalla permite ajustar esta presentación mediante controles como la ganancia que ajusta la sensibilidad general del receptor, el filtro de mar para suprimir ecos producidos por el oleaje cercano, y el filtro de lluvia para reducir interferencias de precipitaciones.
En torno a la imagen se muestran referencias gráficas fundamentales para la navegación. Entre ellas, los anillos de distancia —range rings—, que permiten estimar rápidamente la distancia a un eco, y una o varias **líneas de demora o marcación que ayudan a medir el rumbo relativo o verdadero hacia un objetivo. También es habitual disponer de un marcador de distancia variable que se utiliza para medir el la distancia a un eco seleccionado.
La pantalla permite seleccionar distintos modos de presentación. Por ejemplo, con el barco "proa arriba" o "norte arriba", o “rumbo verdadero arriba”. Asimismo, puede elegirse si el barco permanece centrado o si se lo desplaza hacia abajo para tener mayor campo de vista hacia el frente del barco.
Otro ajuste clave es la escala, que define el alcance máximo visualizado. Esto permite alternar entre una observación detallada del entorno inmediato, útil en maniobras o navegación costera, y una visión más amplia para detección temprana de tráfico o bordes de la costa en navegación en aguas abiertas.
Respecto de la Imagen Reflejada
La imagen del eco en la pantalla de la terminal del radar resulta de la reflectividad dada por los materiales que constituyen el blanco y el ángulo en el que las ondas del radar lo han alcanzado.
Debe entenderse entonces que la imagen del eco no siempre corresponde al tamaño y la forma del objeto real.
Por ejemplo, un barco de madera o de fibra de vidrio será menos visible que una boya metálica, pues el metal refleja mejor la señal que la madera.
A ese tipo de blancos que devuelven un reflejo débil, se los denomina blancos pobres.
Instalación
En embarcaciones recreativas, la altura de instalación de la antena de radar debe elegirse como un equilibrio entre alcance y utilidad en maniobras. Si bien elevar la antena mejora el horizonte del radar —su alcance— y permite detectar blancos lejanos con mayor anticipación, también incrementa la zona ciega cercana, alrededor del barco, donde el haz pasa por encima de objetivos bajos. Por eso, no se recomienda instalarla "lo más alto posible" sin criterio, sino a una altura moderada que ofrezca buena visibilidad en navegación costera y en situaciones de tráfico próximo.
En la práctica, esto se traduce en ubicar la antena en posiciones como el arco de radar, el techo del puente o una sección intermedia del mástil en veleros, procurando que quede por encima de las personas y con un campo despejado, pero sin exagerar la elevación. De este modo se logra un compromiso adecuado: suficiente alcance para navegación segura y, al mismo tiempo, una zona de no visibilidad reducida que no penalice las maniobras en aproximaciones a puertos, zonas de fondeo o en navegación en aguas restringidas.
El Radar y la Prevención de Abordajes
A diferencia del AIS, que depende de la transmisión activa de otros buques, el radar detecta cualquier objeto que refleje su señal: barcos con y sin AIS, boyas, costas, e incluso tormentas. Su función preventiva se basa en identificar ecos alrededor de la embarcación y calcular cómo evoluciona la distancia y el rumbo relativo de cada uno respecto del propio buque.
La prevención de abordajes se apoya en la capacidad del radar para seguir automáticamente un blanco. Cuando el navegante selecciona un eco para seguimiento, el radar comienza a calcular su rumbo, velocidad, CPA y TCPA, del mismo modo en que lo hace el AIS, pero utilizando únicamente la información derivada del desplazamiento real del eco sobre la pantalla. Con estos datos, se puede prever si esa embarcación u otro objeto, se aproximará demasiado, y con cuánta antelación se producirá la situación de mayor riesgo.
Para facilitar esta evaluación, muchos radares permiten definir una zona de guardia o guard zone. Esta es, en esencia, un área circular o sectorial alrededor del buque que el navegante puede configurar como límite de seguridad. Si un blanco penetra en esa zona, el radar activa una alarma sonora y visual. No requiere cálculo de CPA/TCPA: simplemente advierte que algo ha entrado en un espacio que el navegante considera crítico.
Estas alarmas permiten actuar con suficiente anticipación, ya sea modificando el rumbo, ajustando la velocidad o reforzando la vigilancia.
Es importante comprender, sin embargo, que el radar exige interpretación humana: los ecos pueden ser confusos, las condiciones de la zona de navegación pueden degradar la señal, y un mal ajuste de ganancia o filtrado puede ocultar blancos importantes. Por eso, aunque el radar es insustituible en la detección de "objetos no cooperativos", su eficacia depende de la atención y el criterio del navegante.
Combinado con la observación visual y, cuando están disponibles, el AIS y el radar configuran un conjunto de herramientas extremadamente útiles para evitar abordajes, permitiendo construir una imagen precisa del entorno y reaccionar con antelación ante cualquier riesgo de colisión.
Chartplotters
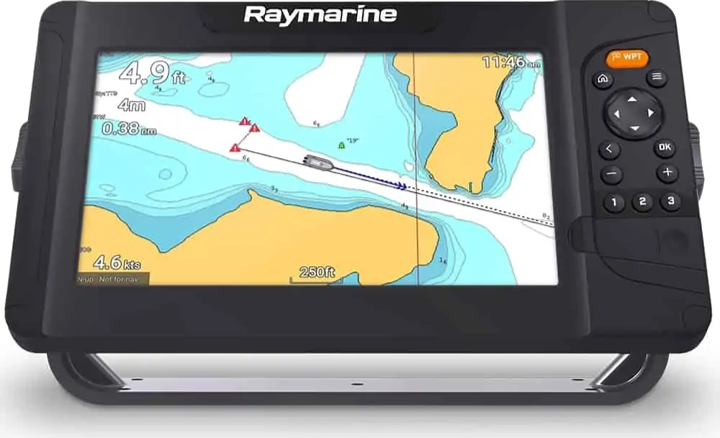
Chartplotter.
Chartplotter es el nombre comercial que engloba a los ECDIS —Electronic Chart Display and Information System, o Sistema de Información y Visualización de Cartas Electrónicas—.
Los ECDIS son aplicaciones capaces de interpretar cartas electrónicas, ya sean ráster o vectoriales, y presentarlas en una pantalla. Sobre esta representación superponen la posición de la embarcación —provista por un receptor GPS— y calculan parámetros de navegación como velocidad y rumbo en cada instante. Además, aprovechan la capacidad de procesamiento del sistema para establecer rutas, seguirlas de forma automática y generar información más compleja al integrar el chartplotter con otros equipos de a bordo, tales como ecosondas, anemómetros, receptores meteorológicos y diversos sensores.
La OMI —Organización Marítima Internacional— establece que los ECDIS deben utilizar cartas ENC oficiales —vectoriales— ya que contienen los metadatos necesarios para que el sistema pueda operar con todas sus funciones de seguridad y alerta. Cuando no se disponga de cartas ENC para una zona determinada, se permite el uso de cartas RNC —ráster— siempre complementadas con cartas náuticas en papel debidamente actualizadas.
Equipos Multifunción
Si bien los chartplotters nacieron como una versión simplificada de los sistemas ECDIS utilizados en buques comerciales, para mostrar la posición del barco sobre una carta electrónica a partir de datos de GPS, con el tiempo, varios factores impulsaron su evolución.
Por un lado, el avance en la electrónica permitió disponer de procesadores más potentes y pantallas de mejor resolución en equipos compactos. Por otro, la creciente estandarización de protocolos de comunicación marítimos, como NMEA 0183 y luego NMEA 2000, facilitó que distintos dispositivos a bordo pudieran intercambiar información de manera sencilla. Esto abrió la puerta a que el chartplotter dejara de ser un equipo aislado y pasara a convertirse en el "centro de datos" de la embarcación.
Así surgieron los "displays multifunción", que integran en una misma pantalla múltiples fuentes de información. El chartplotter empezó a combinar datos de radar, mostrando ecos directamente sobre la carta; a incorporar blancos de AIS con información de tráfico; a integrar la ecosonda para visualizar profundidades en tiempo real; y a mostrar datos de otros instrumentos. Además, se sumaron funciones como seguimiento de blancos, alarmas de colisión, y la posibilidad de dividir la pantalla en varias vistas simultáneas.
En la actualidad, estos sistemas no solo integran sensores de navegación, sino que también actúan como verdaderas plataformas digitales a bordo. Permiten controlar pilotos automáticos, gestionar rutas complejas, registrar datos, conectarse a redes WiFi o móviles, e incluso integrarse con aplicaciones externas. Así, el chartplotter evolucionó desde un visor de cartas electrónicas inspirado en el ECDIS hacia un nodo central que concentra, procesa y presenta prácticamente toda la información relevante para la navegación deportiva.
Con esta nota hemos finalizado la revisión de todo lo relativo a los cuatro problemas de la navegación.
En las próximas notas —unas diecisiete— nos sumergiremos en el capítulo "meteorología.
Mientras tanto, puede entretenerse con este ejercicio.
Este texto forma parte del Manual de Instrucción del Curso de Timonel de Yate de Vela y Motor de la Escuela de Náutica del Club de Veleros Piedrabuena.
 San Isidro, Argentina
San Isidro, Argentina
 CVPB - Jorge Messano
CVPB - Jorge Messano
 22-Abr-2026
22-Abr-2026
 43 minutos
43 minutos


















 inicio
inicio
 escuela
escuela
 nota anterior
nota anterior
 nota siguiente
nota siguiente

